
seerqaq
后端
· 1月前
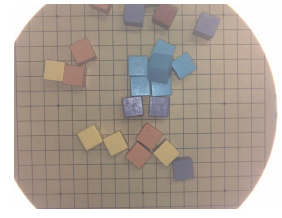
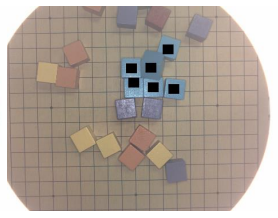
为提高机器人抓取自主性,开发了基于视觉导引的智能分拣机器人系统。1、基于张正友标定法完成机械臂...
机械臂抓取开发
https://www.proginn.com/w/1468408
资源下载
 分享
分享
 点赞
点赞
 评论
评论
seerqaq
后端
· 1月前
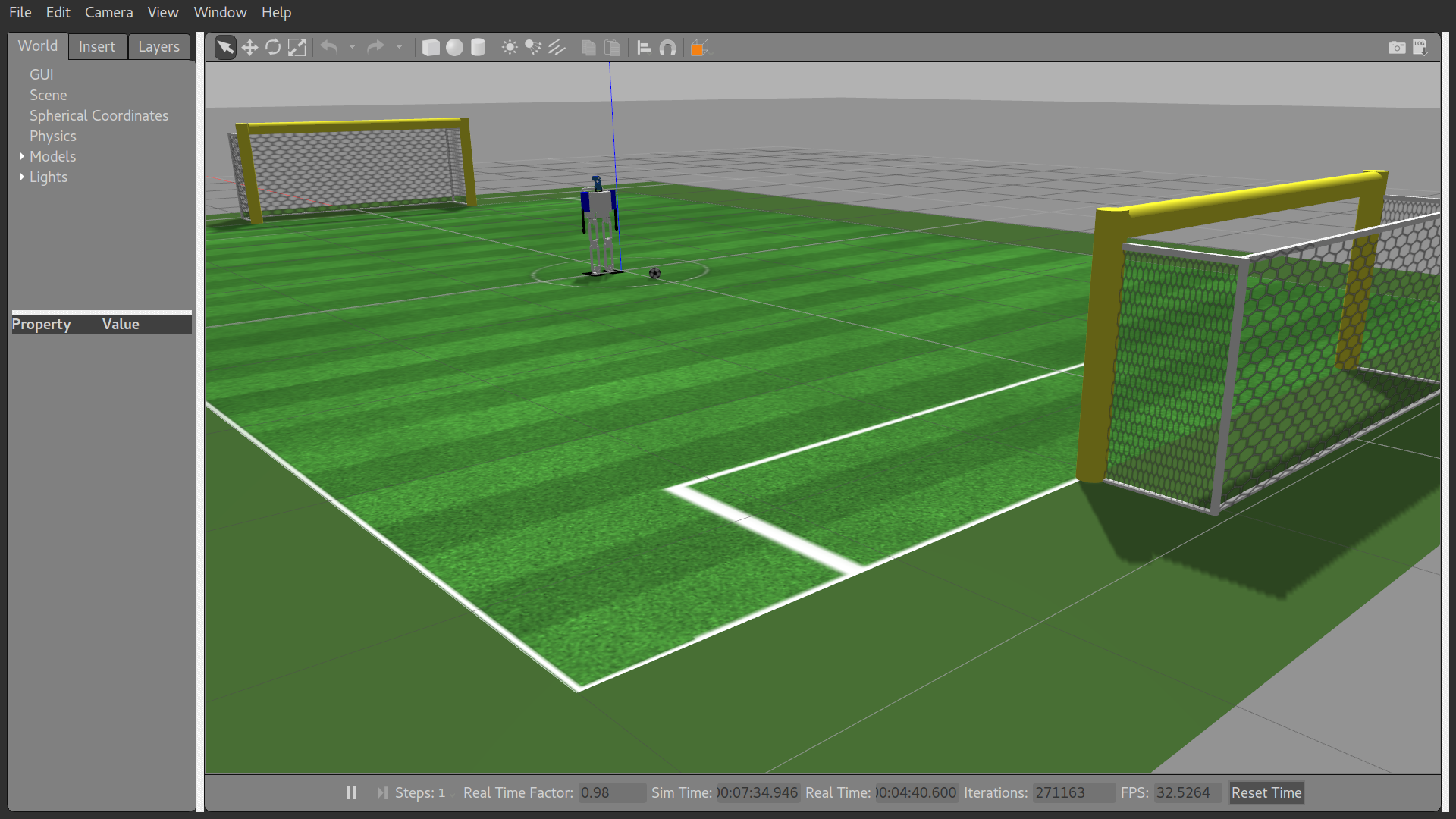
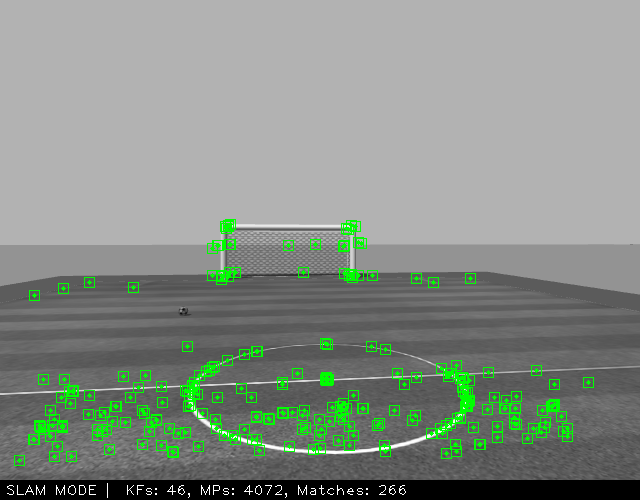
目前双足机器人在场地中的定位借助场地中的标志物实现,定位精度不足。本人负责工作如下:1、基于视...
机器人定位
https://www.proginn.com/w/1468407
资源下载
分享
点赞
评论
seerqaq
后端
· 1月前
国内外RoboCup世界杯竞赛驱动,针对自研双足机器人平台,赋予其感知能力和运动能力,与同组别...
双足机器人
https://www.proginn.com/w/1468406
资源下载
分享
点赞
评论