
小许同鞋138
硬件开发
· 1月前
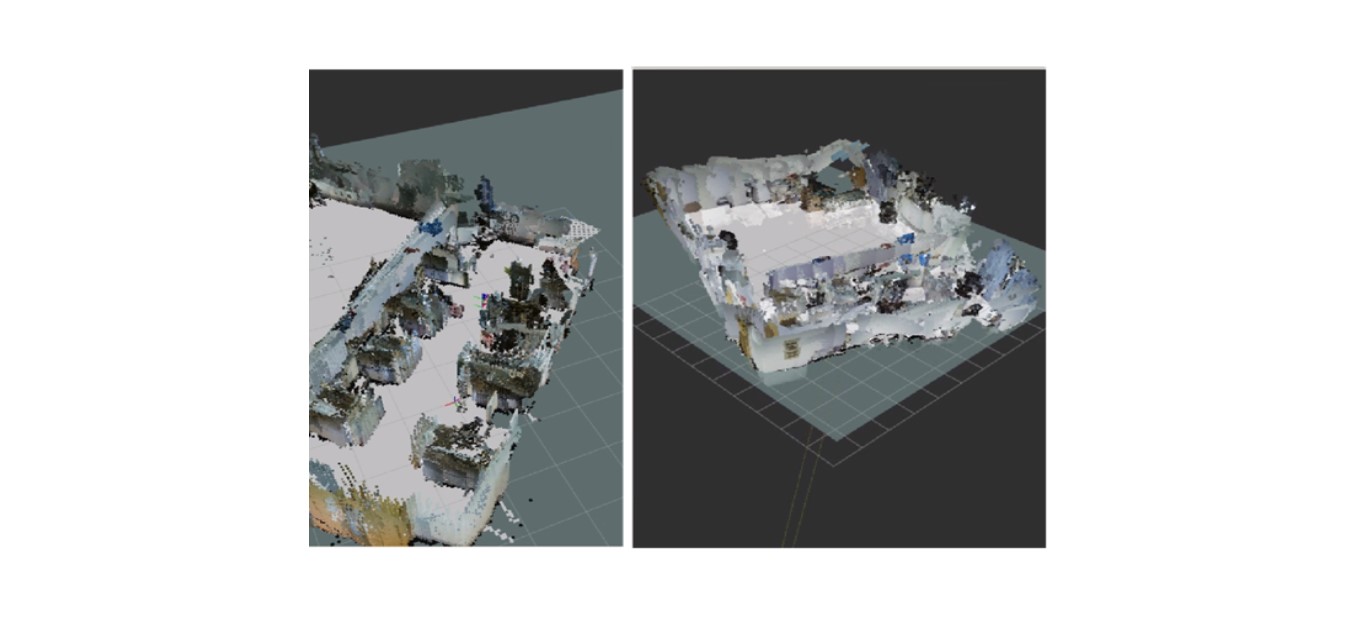
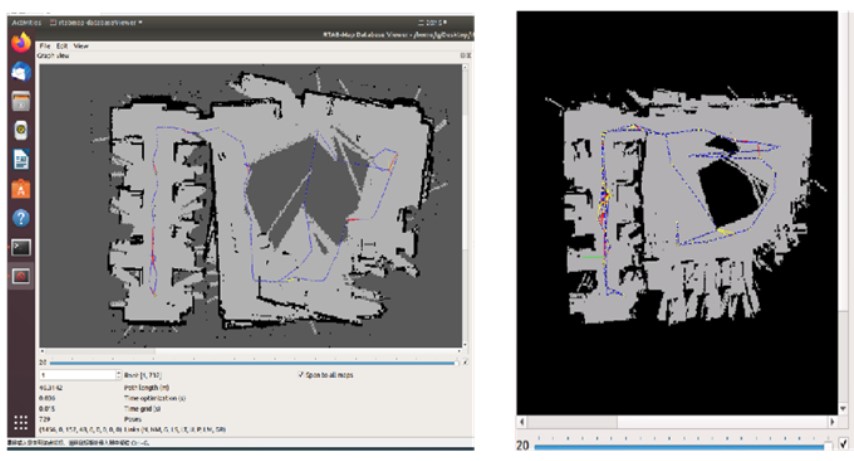
基于树莓派4b的和stm32单片机的Ros小车,通过深度摄像头实现室内场景建立稠密点云图,同时...
基于ORS系统的SLAM无人车
https://www.proginn.com/w/1542548

资源下载
 分享
分享
 点赞
点赞
 评论
评论