
Louie打工人
后端
· 1月前
1.基于工控机为控制系统,CAN通讯协议控制阿克曼移动底盘运动2.激光雷达融合惯导实现小车导航...
轮式可移动焊接机器人
https://www.proginn.com/w/1522289


资源下载
 分享
分享
 点赞
点赞
 评论
评论
Louie打工人
后端
· 1月前
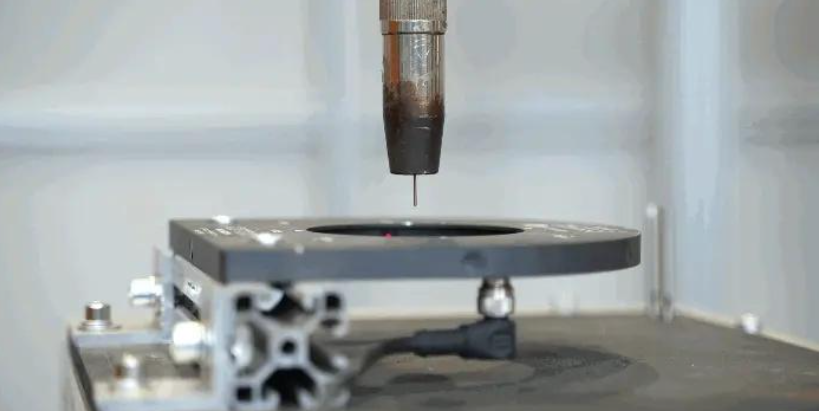
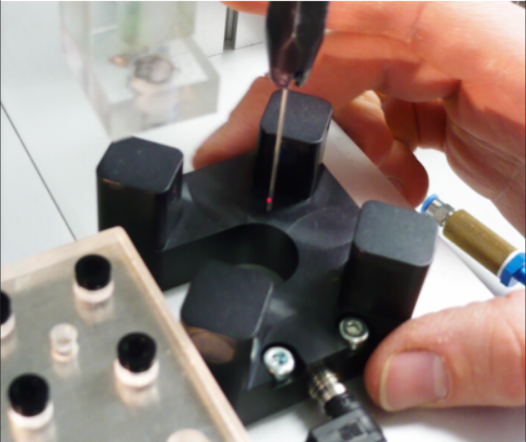
1.负责校正算法设计,包含机器人运动学计算,通过焊丝触发四个象限点激光,记录点激光触发时间,可...
机器人TCP自动校正系统
https://www.proginn.com/w/1522287
资源下载
分享
点赞
评论
Louie打工人
后端
· 1月前
1.机器人电气硬件系统开发,基于CAN协议通讯驱动系统包含12个,基于485通讯传感器5个,包...
喷墙抹灰机器人开发
https://www.proginn.com/w/1522282


资源下载
分享
点赞
评论