 3D视觉工坊
3D视觉工坊





ROS是什么?

随着人工智能技术的飞速发展与进步,机器人的智能化已经成为现代机器人发展的终极目标。机器人发展的速度在不断提升,应用范围也在不断拓展,例如自动驾驶、移动机器人、操作机器人、信息机器人等。机器人系统是很多复杂算法模块的集合,如障碍物检测、行为决策、智能控制、环境识别等,从零开始开发系统对技术人员要求非常高,而且工作量巨大。通用机器人框架的应用能把这一复杂的开发过程简单化,技术人员可以将更多的精力放在算法模块的迭代上,不需要关心具体配置管理、部署运行、底层通信等功能。而ROS就是一个比较强大、灵活的机器人编程框架。从软件架构的层面来说,它是一个基于消息传递的分布式多进程框架。ROS基于消息机制的通信,使开发者可以根据功能把软件拆分成独立的子模块,子模块通过不断的组合,建立起比较复杂的系统来完成复杂的功能,这些特点能很好地适应机器人操作系统框架的要求。
ROS目前推出了ROS1和ROS2两个版本,ROS1节点间的数据传递通过内存复制,大量的系统资源都浪费在通讯上,通信实时性也不能得到保障。除此之外,ROS1 通过一个核心的master 节点管理所有节点间的通信,master节点的崩溃将会导致整个系统运行错。ROS2在ROS1的基础上做了以下改进优化:

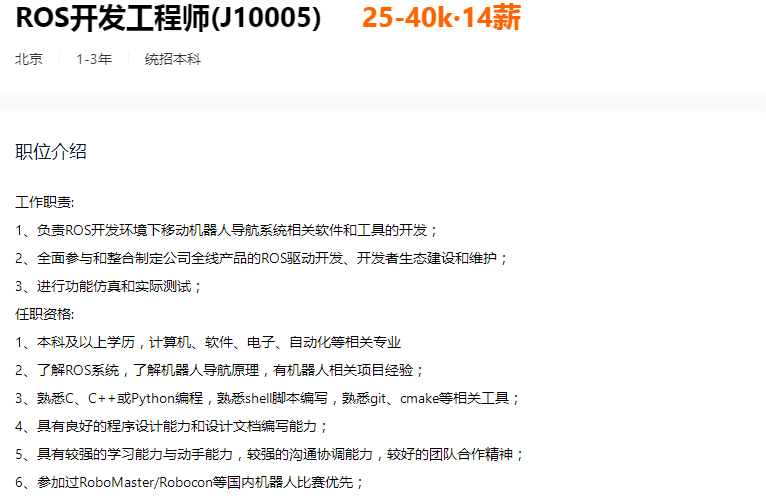
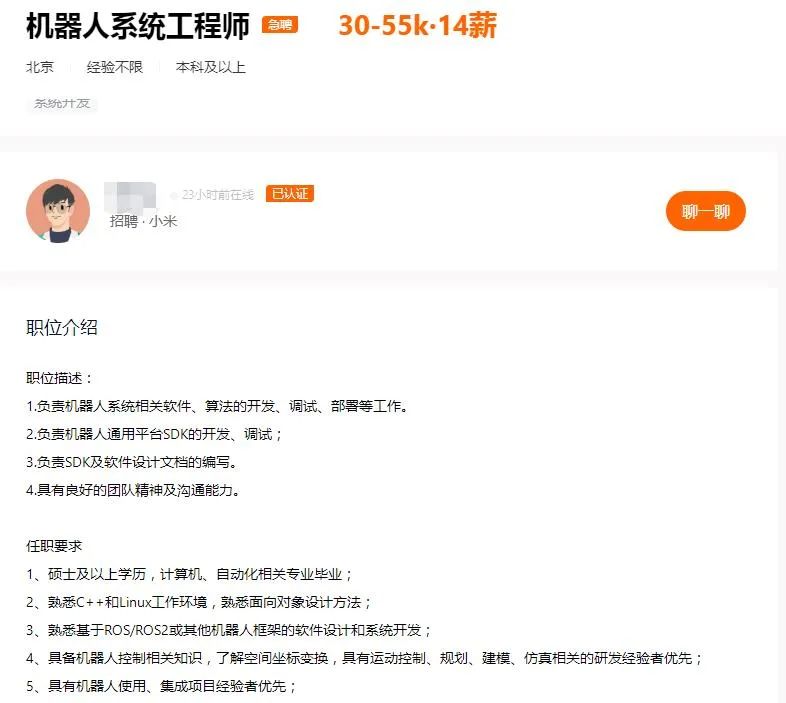
岗位与工作机会

如何入门到精通?
讲师介绍
课程亮点
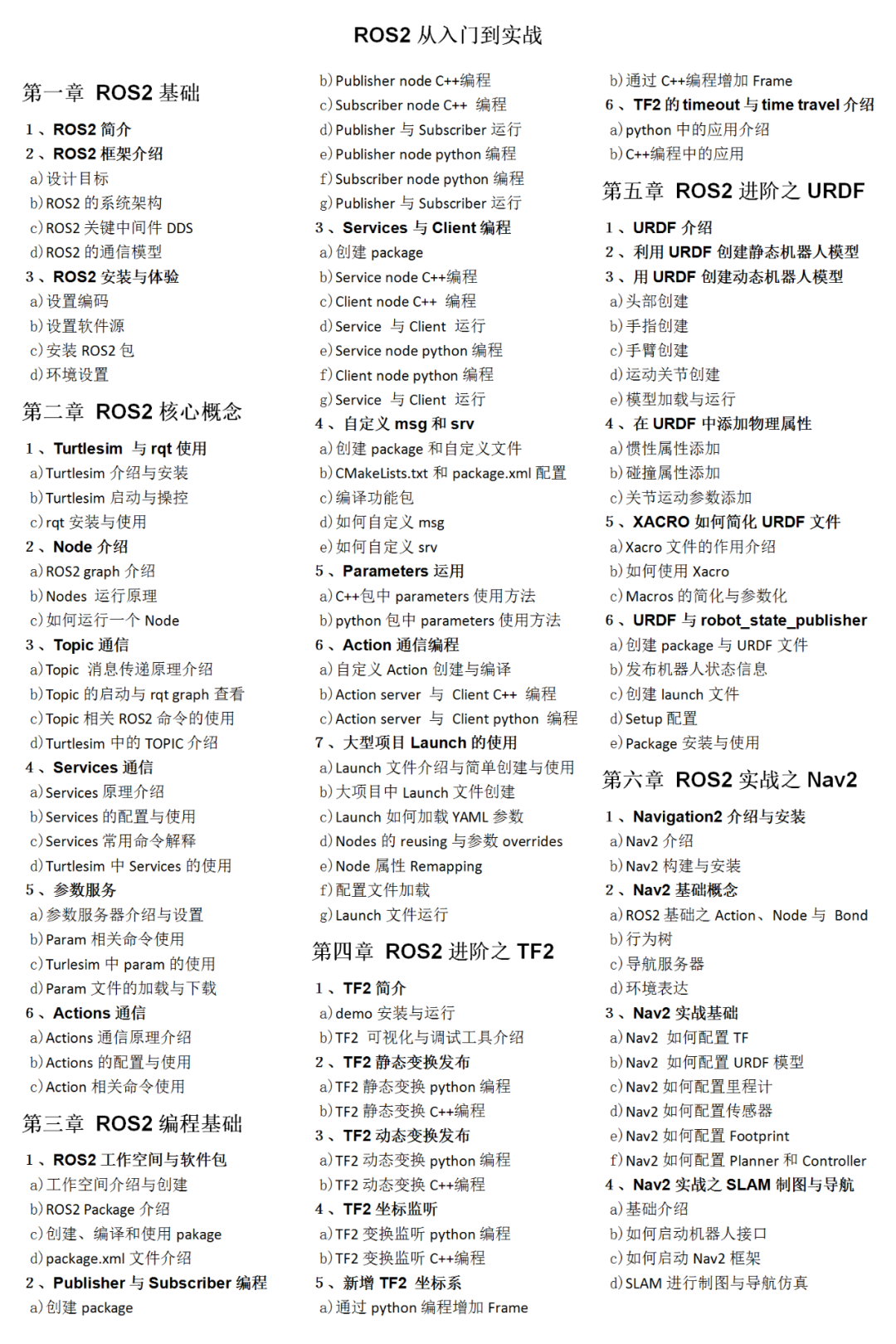
1. 国内首个全面介绍ROS2框架的视频课程;
2. C++和python两种编程语言教学;
3. 循序渐进,从基础到高阶,实操教学;
4.专属的学习交流群,可以与讲师和各大院校的人才进行沟通交流,一起分析和讨论遇到的难题,防止闭门造车;
5. 真正能面向工业落地的内容分享;
学后收获
面向对象
开课时间
课程咨询与购买

QQ咨询群:910070197
▲课程咨询QQ群,了解更多


