AI人工智能初学者
AI人工智能初学者




4月8日, 滴滴自动驾驶发布连续5小时无接管重磅视频。这是滴滴自动驾驶团队软件版本迭代后,于近期录制的一支路测视频。从画面中可以看出,公开道路上测试场景丰富,在路测过程中有穿梭的行人、自行车、摩托车,以及大型车辆等,视频如下:
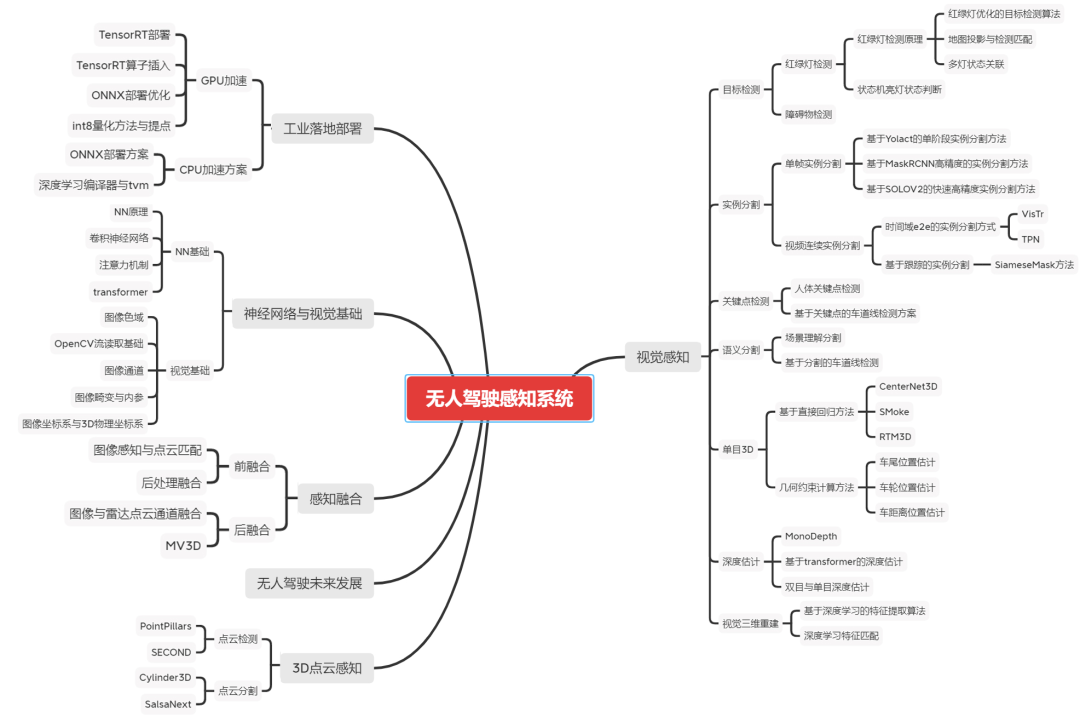
课程内容框架
从这个课中,你将学到什么内容?
精讲目标检测算法系统,包含传统目标检测、二阶段/单阶段目标检测;精讲AnchorFree系列目标检测算法,如AnchorFree、CenterNet算法等;
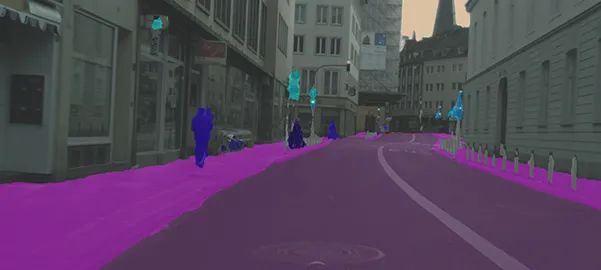
精讲语义分割、实例分割以及全景分割算法系统,包含语义分割模型的优化、SOLOv2实例分割算法、PanopticFCN全景分割算法等;
概述深度学习模型的相关知识,包括模型的部署与TensorRT加速、量化与剪枝等;
以实例讲解单目与多目传感器的视觉测距系统,如深度预测、障碍物检测、真实环境感知等;
介绍两种主流的无人车障碍物感知系统,分别是基于检测与分割、基于深度估计与检测等;
介绍两种常用的自动驾驶感知融合方法——前融合和后融合,以及详细的融合方法与策略;
详细讲解自动驾驶中的多目标跟踪系统,包括基于深度学习表征提取的跟踪、DeepSort系统等;
详尽讲解自动驾驶在工业场景中的部署应用,如红绿灯识别、车线检测、道路标识定位等;
讲师介绍

sky_hole
自动驾驶领域资深从业人员,曾参与滴滴出行早期自动驾驶系统的研发,前腾讯自动驾驶研究员,现某自动驾驶公司感知系统高级专家。
课程大纲

项目实战
项目1给定手部检测框,用OpenCV绘制对应关键点信息检测图。

项目2分割图渲染,对语义分割的图片进行类别筛选与原图渲染。
项目3通过传感器外参,复现3D空间坐标点通过参映射回图片坐标系,并生成3D框。

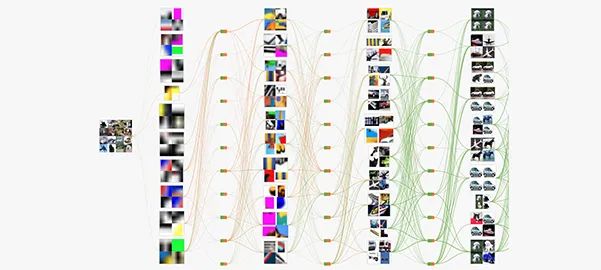
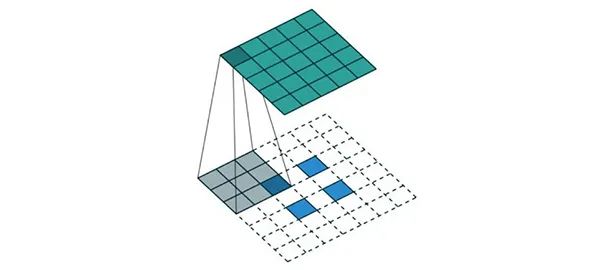
项目4将pytorch若干个卷积层后输出的特征图进行可视化,并参阅不同可视化方法。
项目5编写程序,使用OpenCV霍夫直线检测算法检测,并且推导霍夫变换公式。

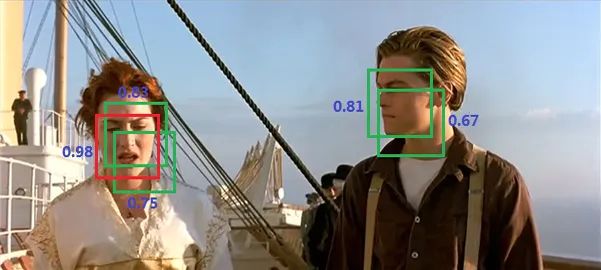
项目6编写程序,对目标检测的输出框进行最大值抑制算法(nms)算法。
项目7对模型输出的实例分割结果进行分析,并将结果显示在图片上。

项目8对于输入(C,H,W)张量,推导卷积输出尺寸的计算公式。
特色服务

课程须知
开课时间:5月13日
学习方式:线上学习
开课时长:为期13周
计划安排:共15章,每周计划学习1~2章
挑战项目:8个挑战项目
答疑渠道:班级群答疑、直播答疑
适合人群
适合高校自动驾驶、计算机相关领域的研究生
适合从事自动驾驶感知、计算机视觉和3D点云的工程师
适合自动驾驶相关研究机构的研究人员
适合自动驾驶相关项目的项目经理、负责人
课程福利
提供完整课件、参考资料
开课后一年视频有效期
颁发电子结业证书
优秀学员颁发实物结业证书
优秀学员赠送200睿币(价值200人民币,可抵扣课程)
如何报名