 新机器视觉
新机器视觉






1
2. 系统讲解三维空间基础知识,掌握欧拉角、旋转矩阵、四元数等刚体运动变换、三维空间变换基础知识;
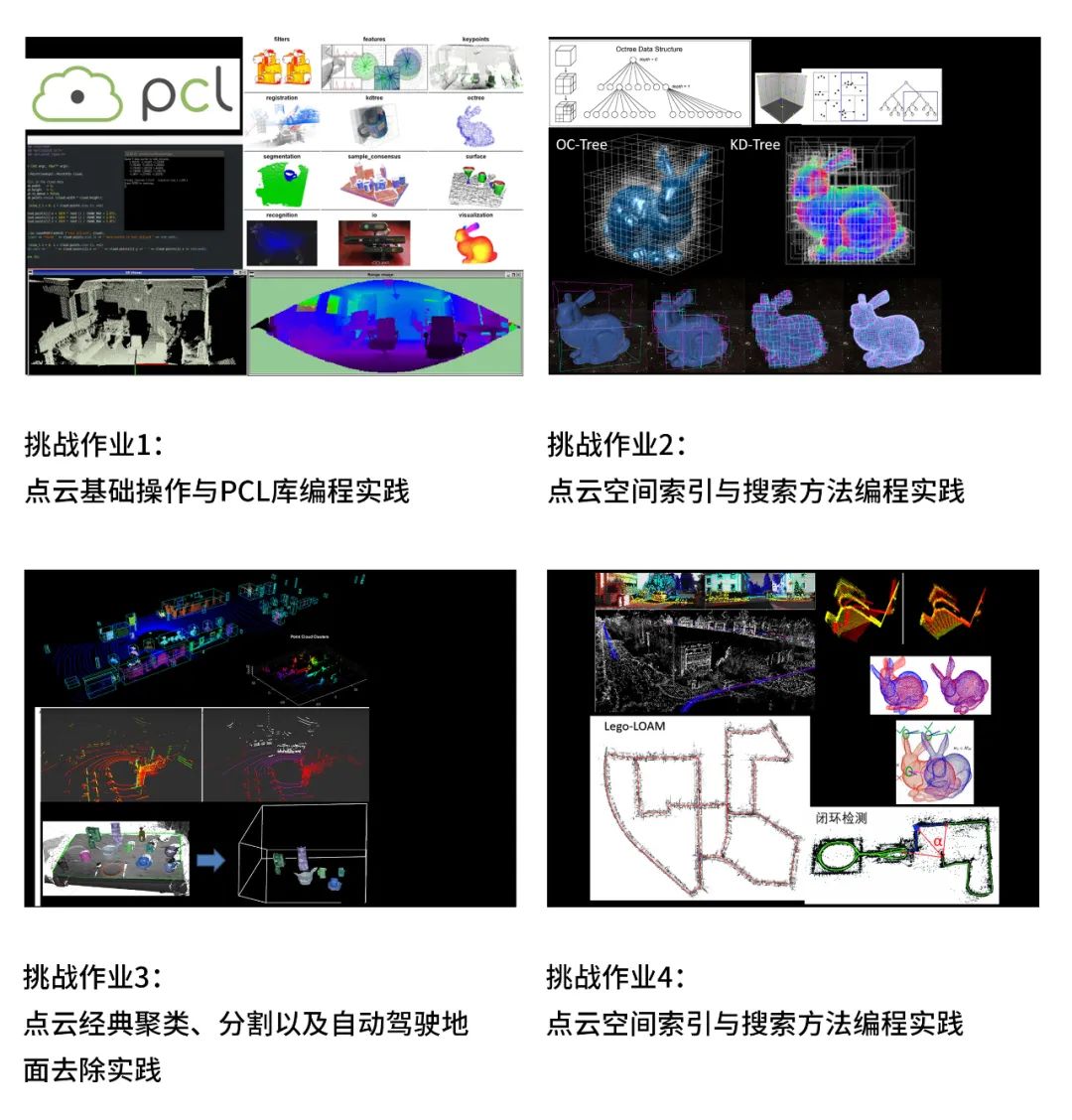
3. 熟练掌握点云空间索引结构和搜索方法,包括KD-Tree,OC-Tree 等,掌握点云表征,滤波,聚类,分割,识别等几大核心问题,熟练掌握 PCL 点云库并进行项目实践;
4. 掌握基于点云特征的激光 SLAM 框架和原理,包括前端配准(ICP,PL-ICP,NDT 等),回环检测等;
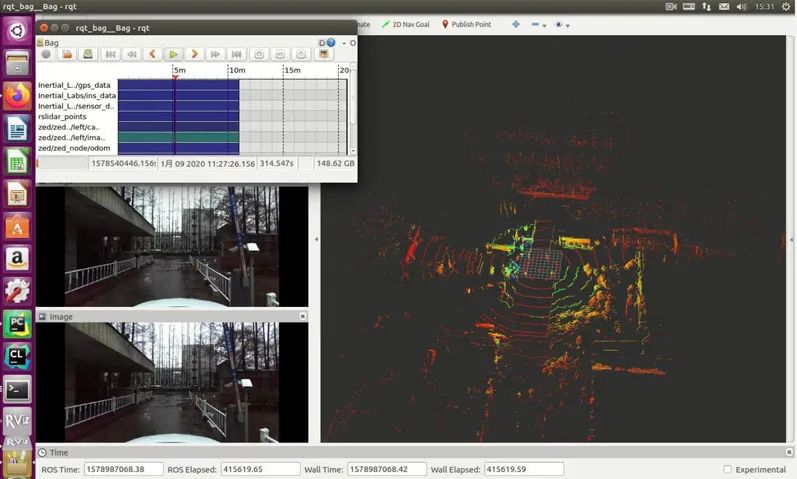
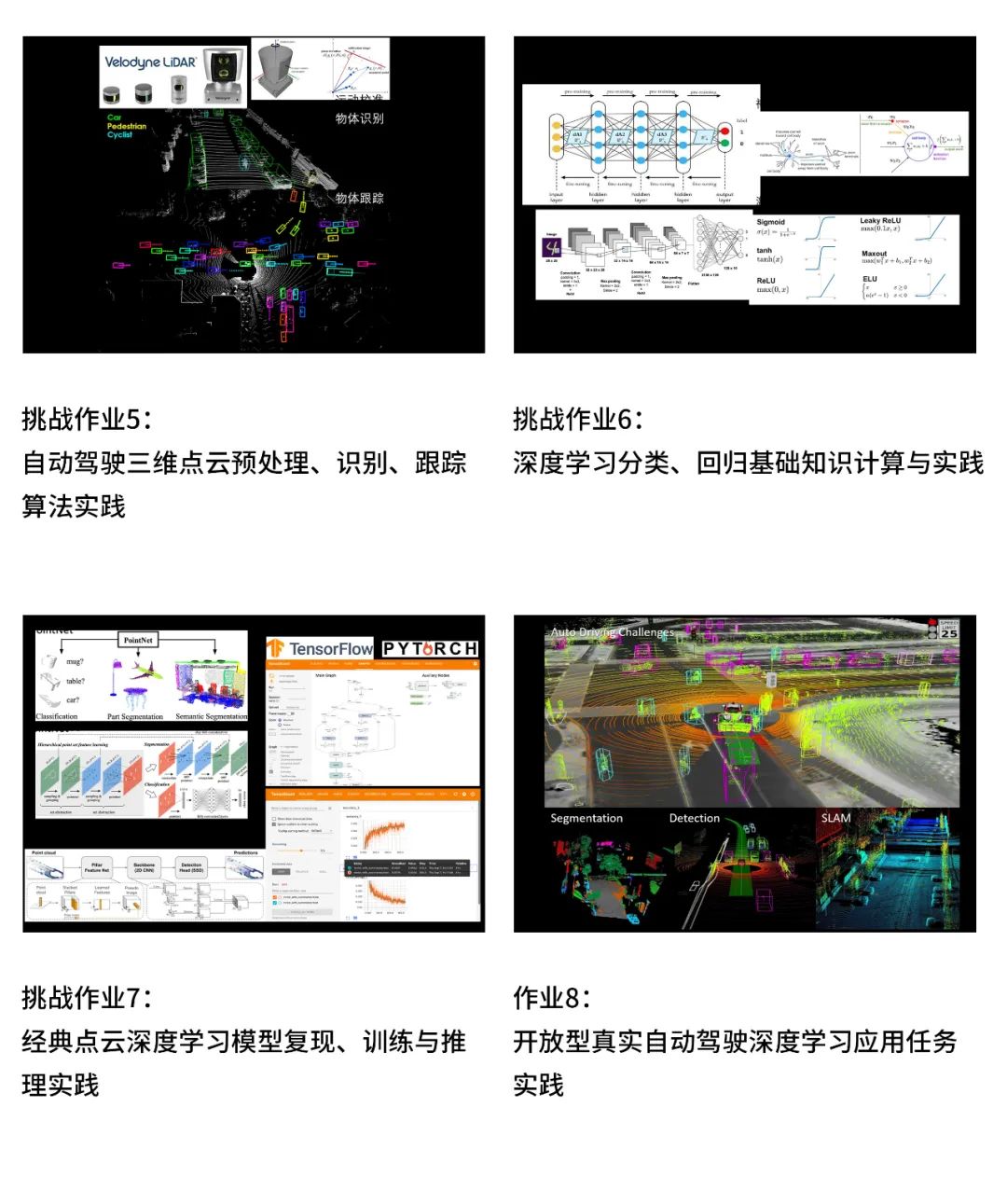
5. 学习基于特征工程的激光点云识别与跟踪算法,介绍多传感器融合原理和方法;结合理论深度探究自动驾驶点云应用实践,包括激光雷达采集,校准,跟踪,识别和建图等核心任务;
6. 全面了解深度学习在点云研究的热点问题,学习利用深度学习解决三维点云处理问题,包括点云分类,分割,注册配准,重识别,重定位,物体识别等方向;
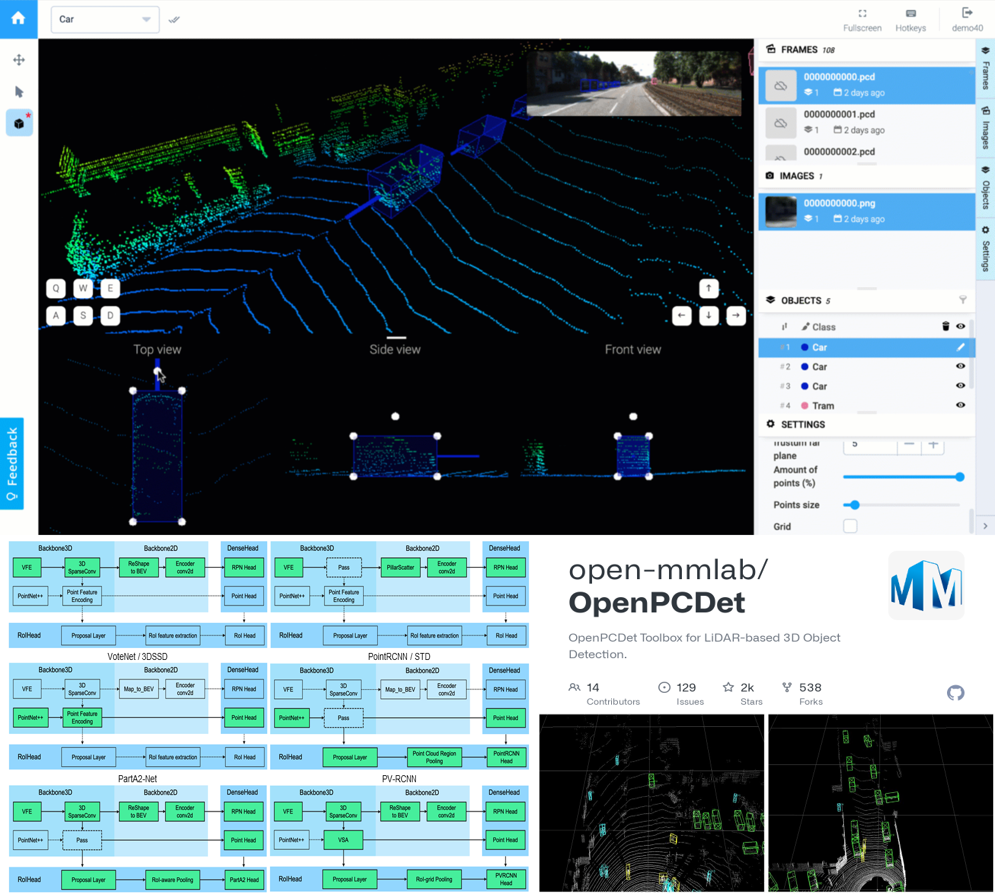
7. 深入学习经典点云深度学习模型,利用工程实践复现经典模型深化理解,包括 PointNet,PointNet ++,DGCNN,PointCNN,PointPillars,PointRCNN,3D 点胶囊网,PointNetVLAD,PointNetLK,Deep Closest Point 等;
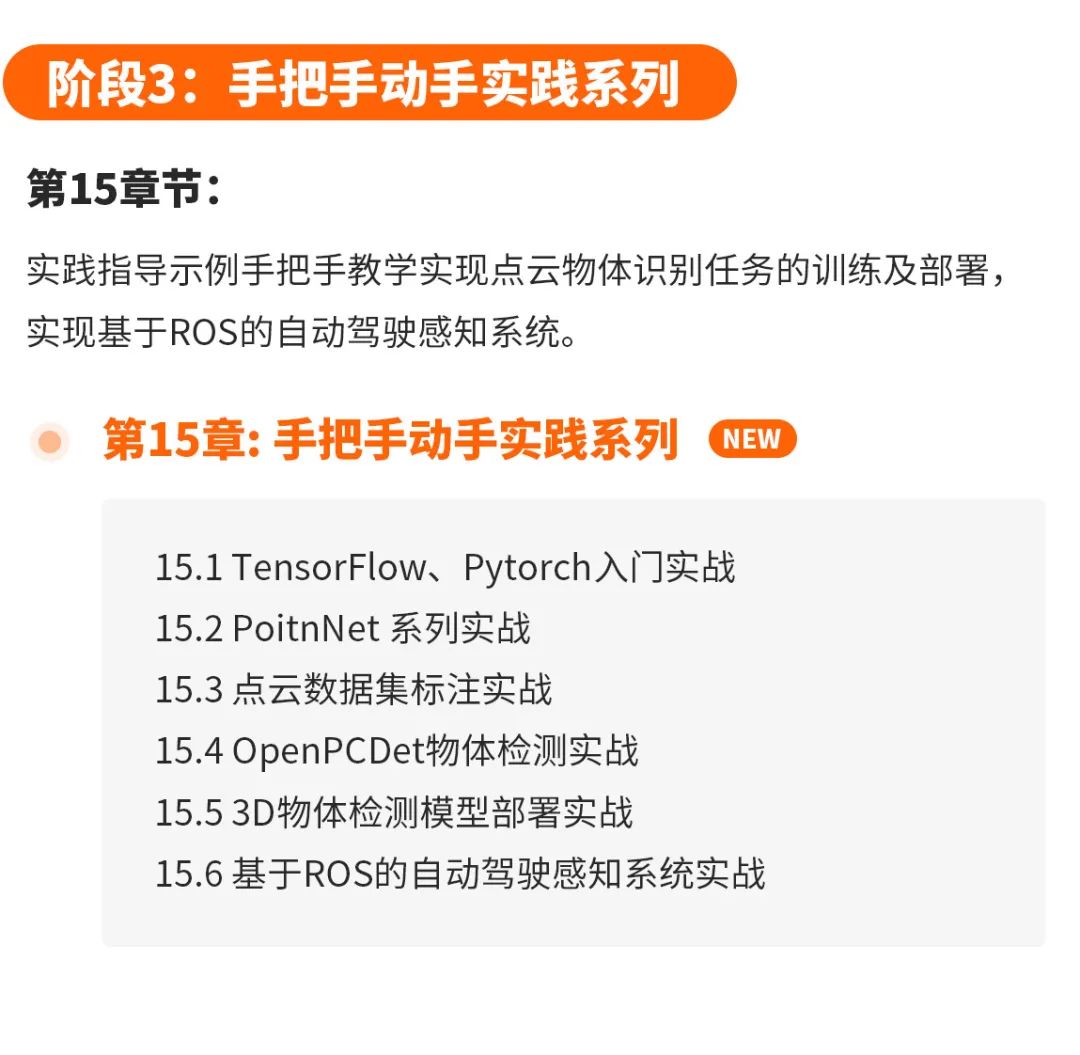
9. 开展手把手动手实践系列(第三期新增),针对点云物体识别部署的热点项目开展实践教学,包括数据集采集标注、物体检测网络训练调参、TensorRT 推理部署、ROS 感知系统实践等。
2
专业讲师

索传哲
柯柏文(深圳)科技有限公司研发总监
东南大学 FutureX Lab 无人驾驶研究负责人
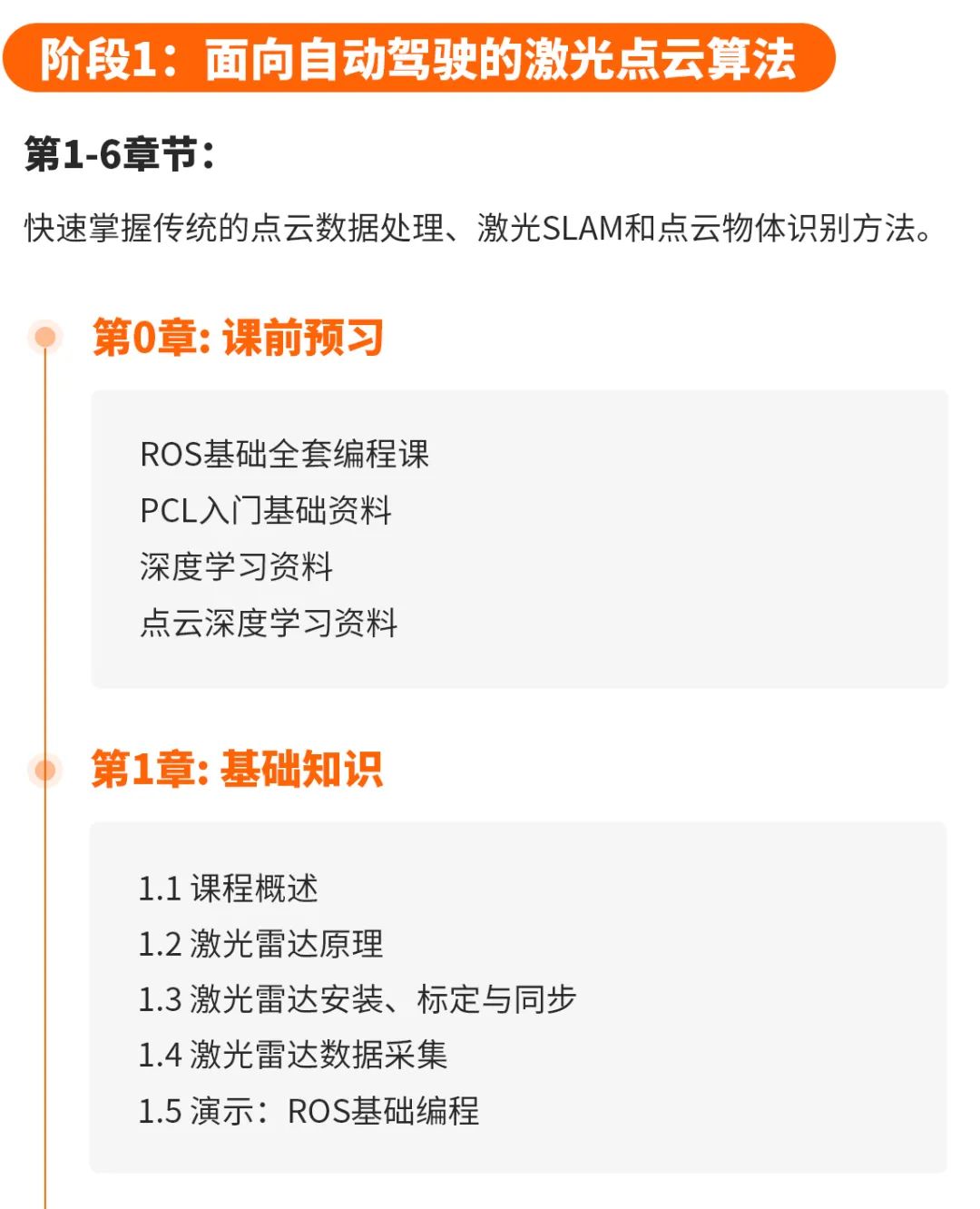
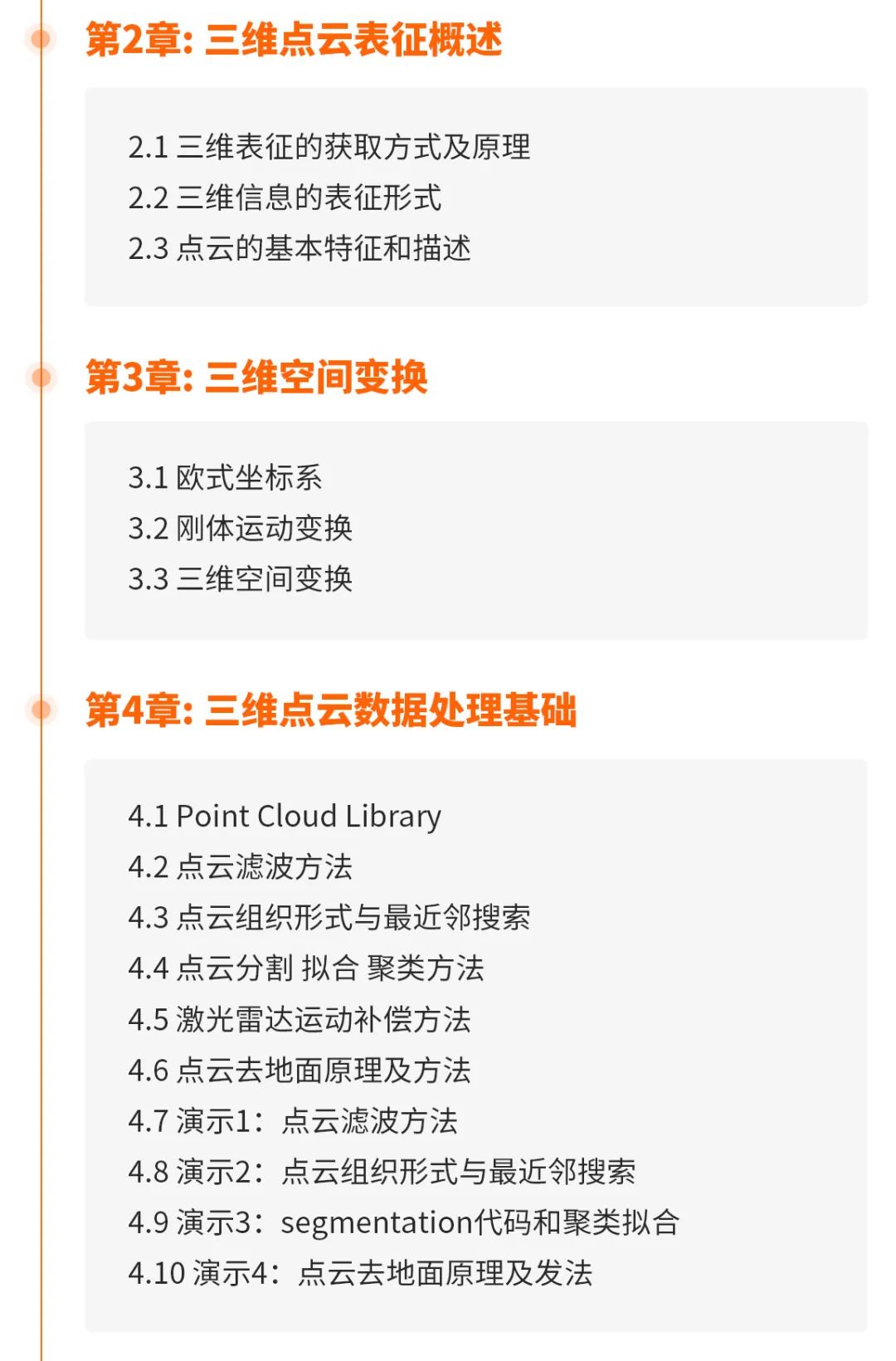
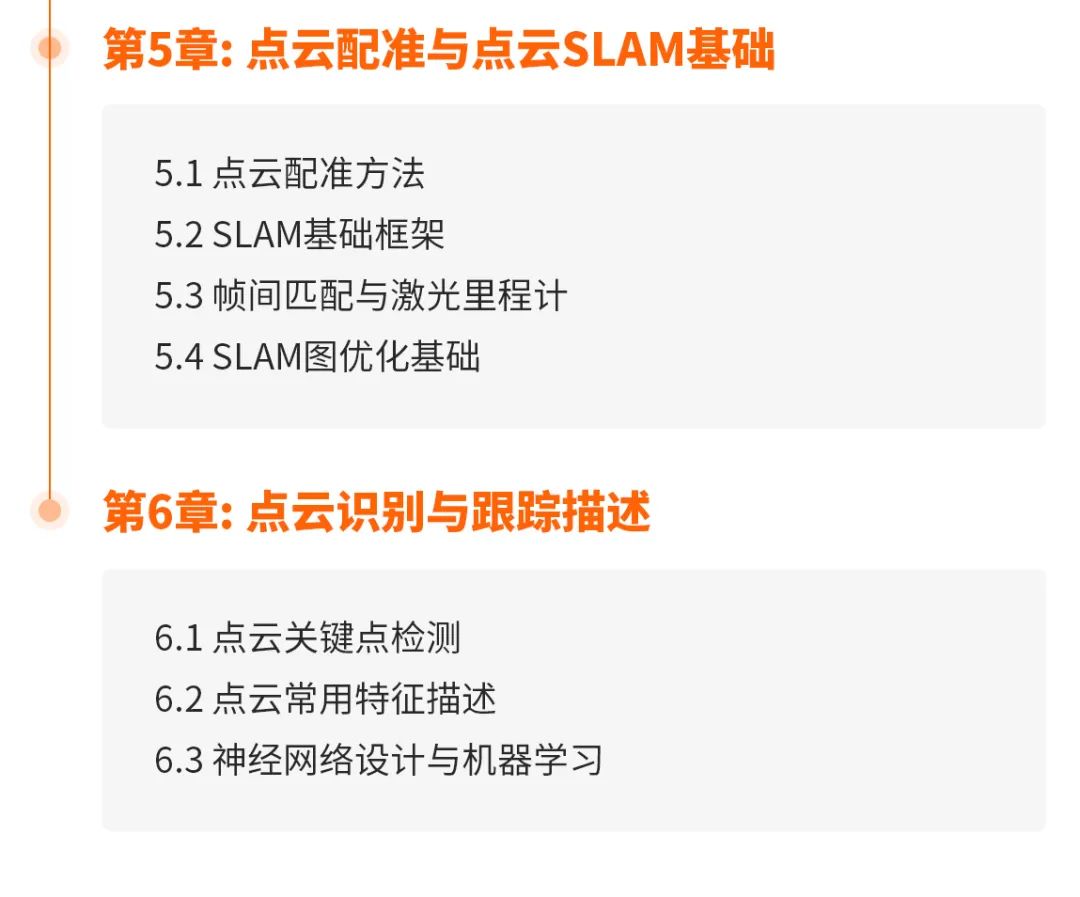
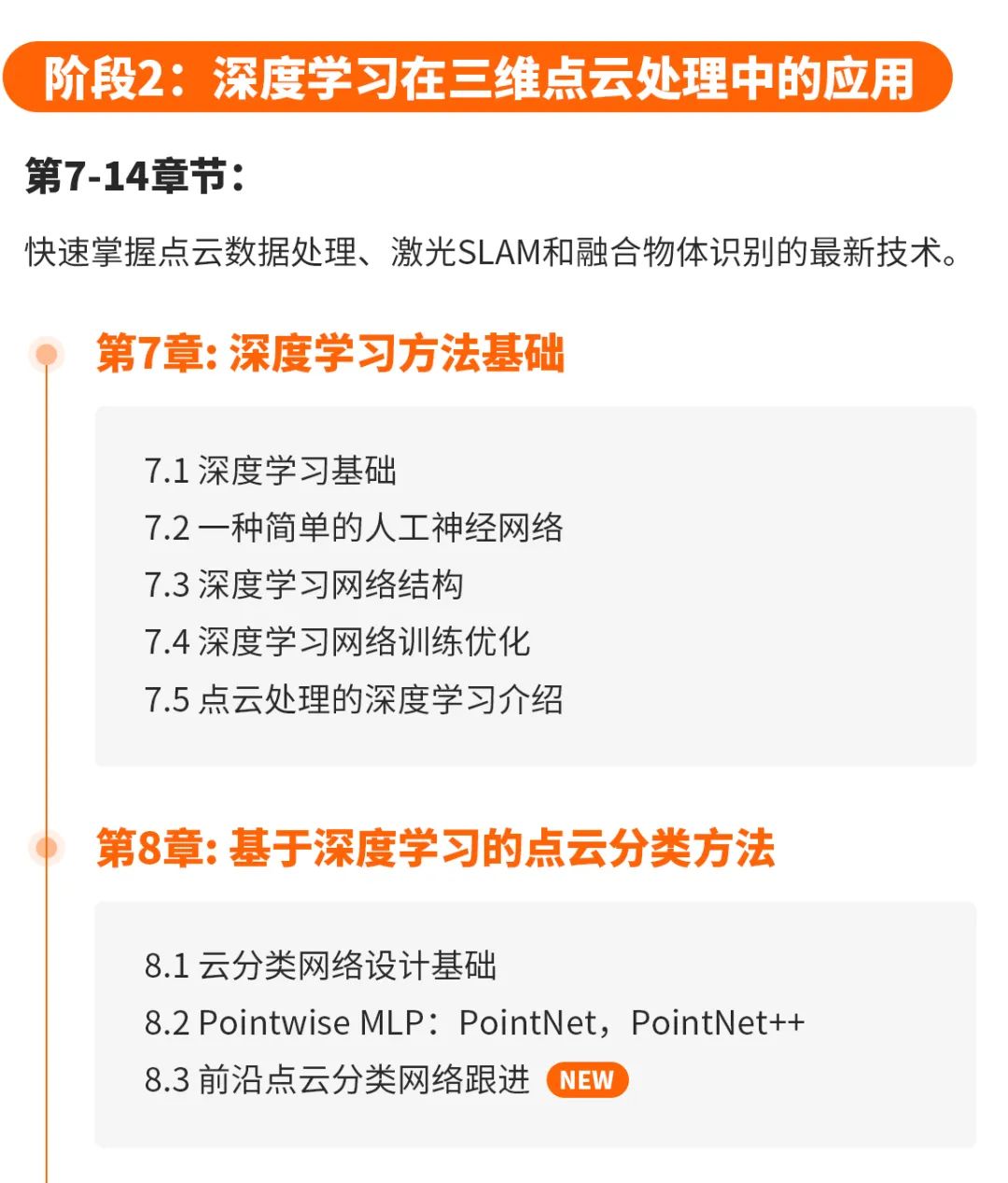
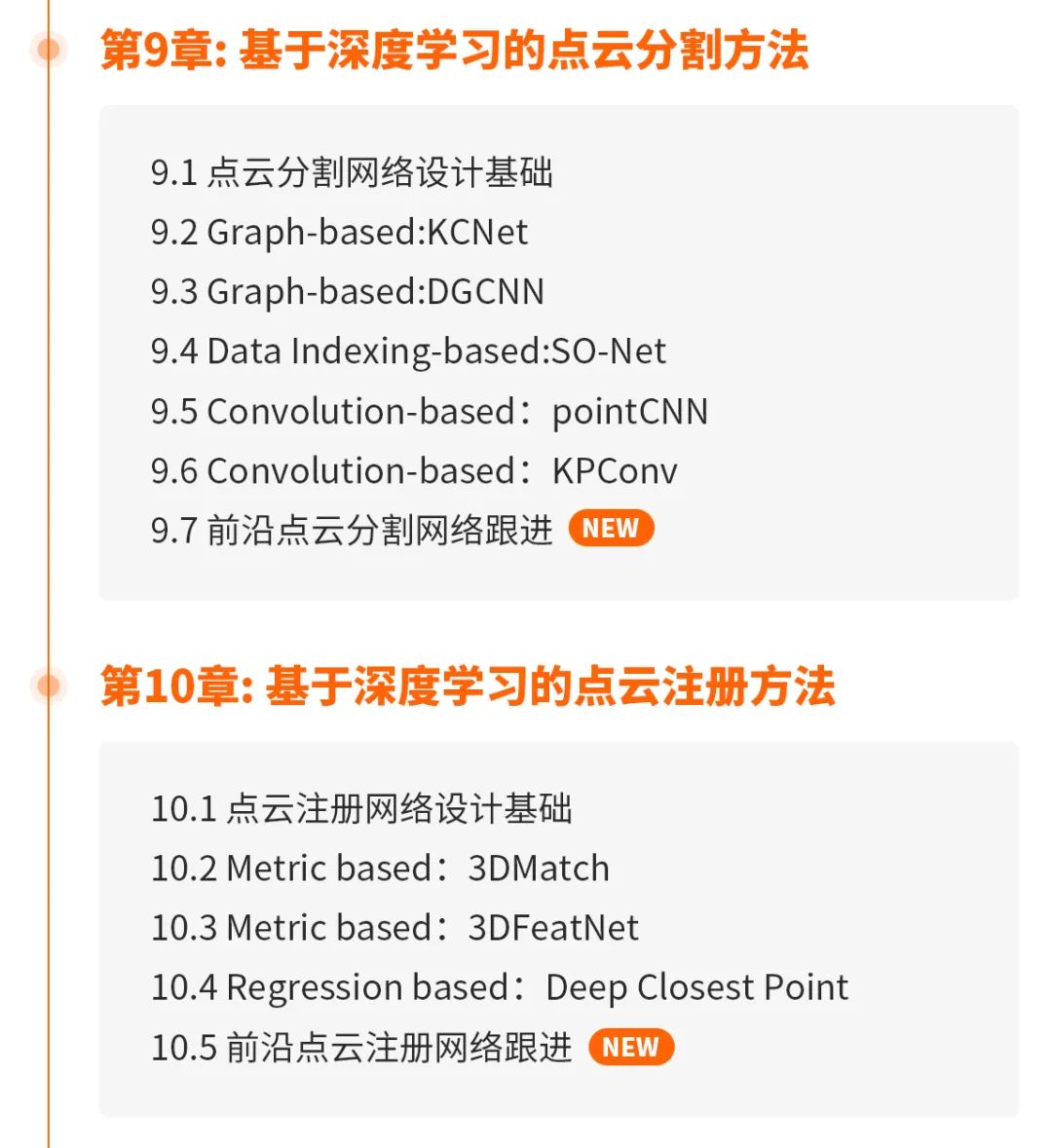
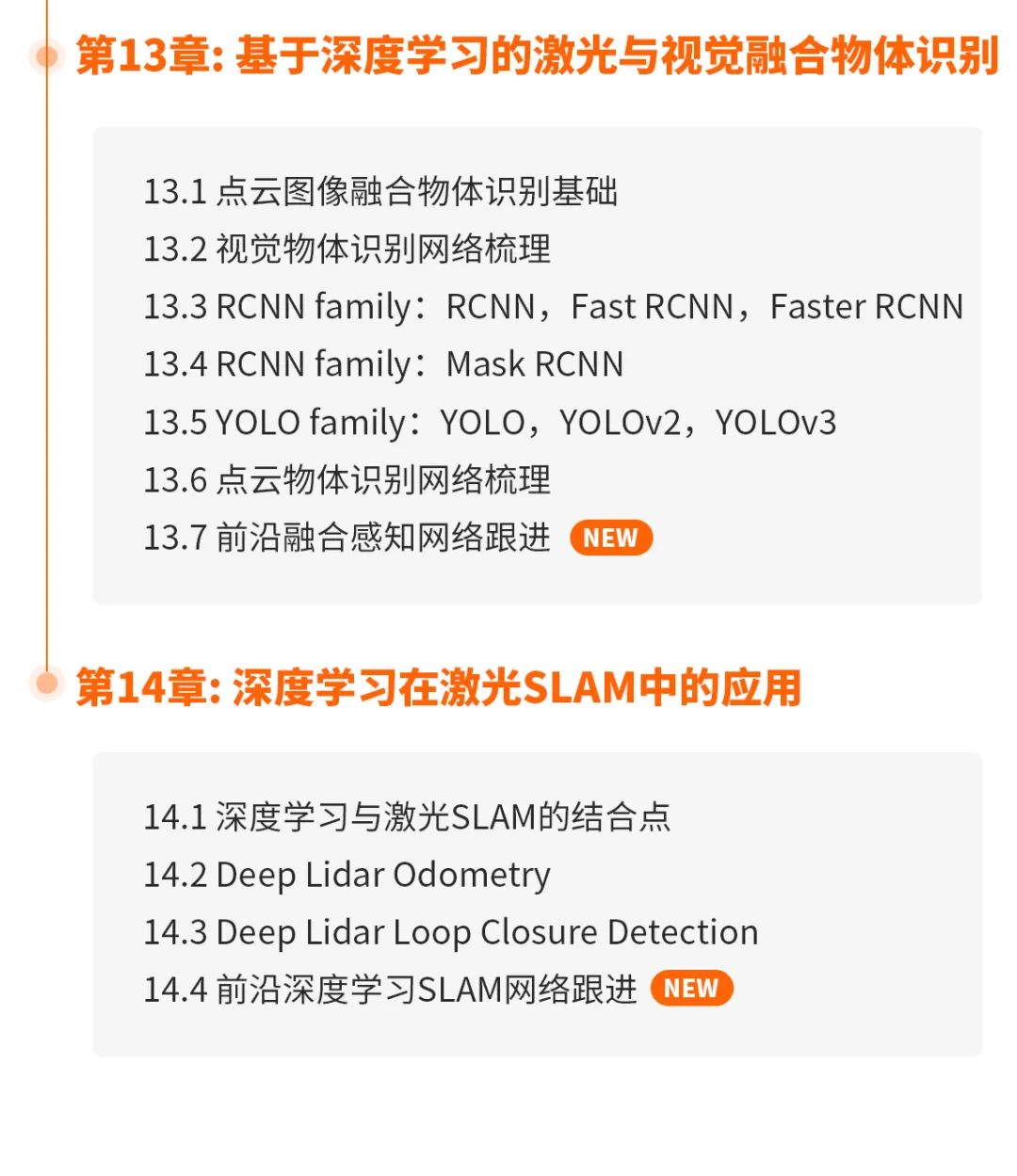
课程大纲




实践项目
除了提供项目练习,每章节布置课后作业和期末大作业,老师会进行作业批改和讲解,并提供相关代码。提供直播答疑和微信群答疑,帮助同学第一时间解答疑惑,让同学不仅能够高效的巩固学习,还能学以致用。
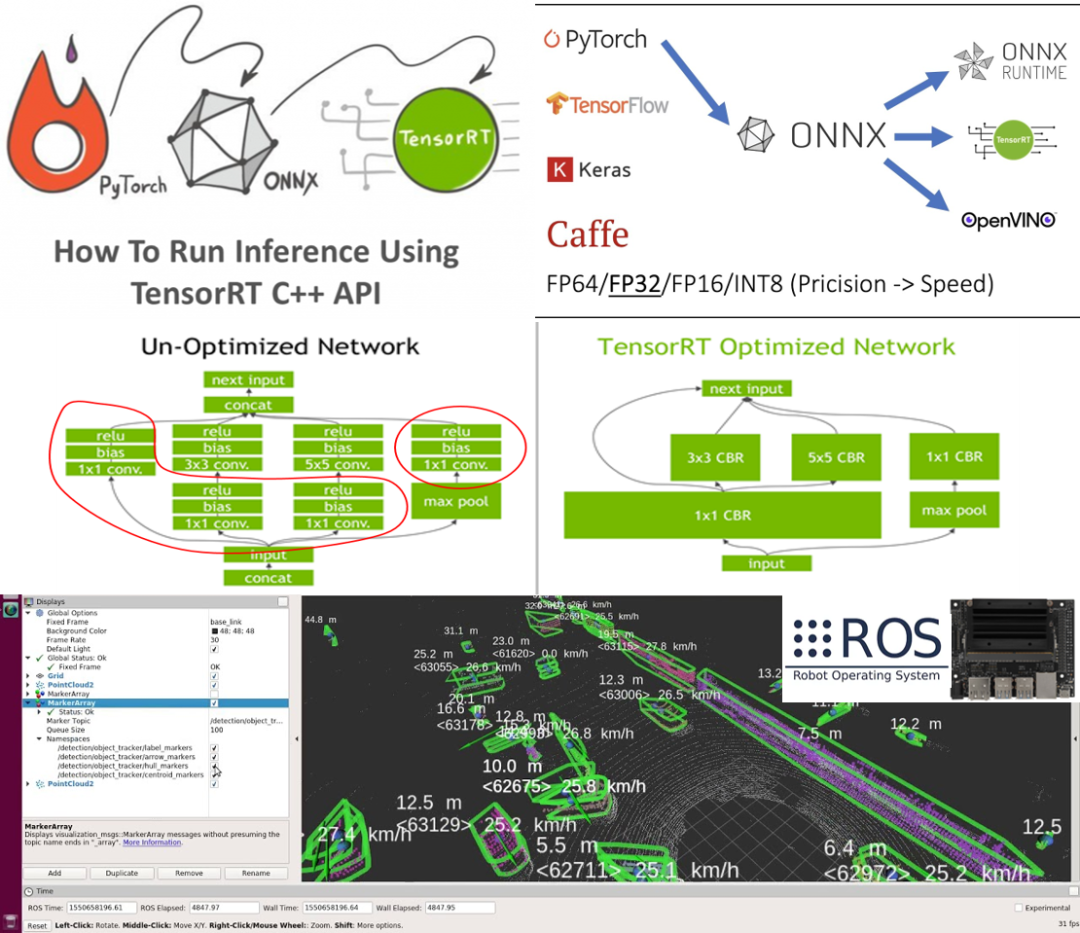
手把手实践2:检测网络部署与ROS感知系统搭建
1. PyTorch/TensorFlow训练模型转TensorRT部署实践
2. 依托ROS系统调用部署模型打造自动驾驶点云感知系统
完善教学模式

3
课程设置
开课时间:9月2日
学习方式:线上学习(录播视频+直播答疑)
开课时长:预计为期15周
计划安排:共15章,每周计划学习5~10h
项目作业:8个练习项目+2个实践项目
答疑渠道:班级群答疑、直播答疑
先修知识
具备一定的高数、线性代数基础知识 具备一定的C++及Python的编程基础 了解深度学习基础知识
适合人群
希望了解系统点云处理或入门三维点云研究方向的学生 希望从事自动驾驶或机器人领域三维感知算法与应用的工程师 希望了解三维点云研究前沿和方向的相关领域科研研究人员
课程福利
提供完整课件、参考资料、相关代码 提供实践作业并进行批改 视频有效期一年 颁发电子结业证书 优秀学员颁发实体证书 优秀学员赠送200睿币(价值200人民币,可抵扣课程)
立即报名

