 新机器视觉
新机器视觉




来源:3D视觉工坊
论文题目:The influence of the focus in the camera calibration process
作者:Won-Hoe Kima, Bongjoong Kim等
作者机构:Department of Mechanical Engineering, Yonsei University, Seoul, 03722, South Korea等
论文链接:https://arxiv.org/pdf/2402.00977.pdf
代码链接:https://wonhoe-kim.github.io/SFNet/
在相机标定过程中,焦点的影响是需要考虑的关键因素之一。传统的针孔模型假设焦距恒定,但实际相机的焦距会因拍摄物体而略微变化,这可能导致标定结果的偏差。为了解决这个问题,可以提出一种具有距离依赖焦距的针孔模型,从而更准确地描述相机的行为。这种改进可以显著提高标定过程的准确性和稳健性。
 读者理解:
读者理解:
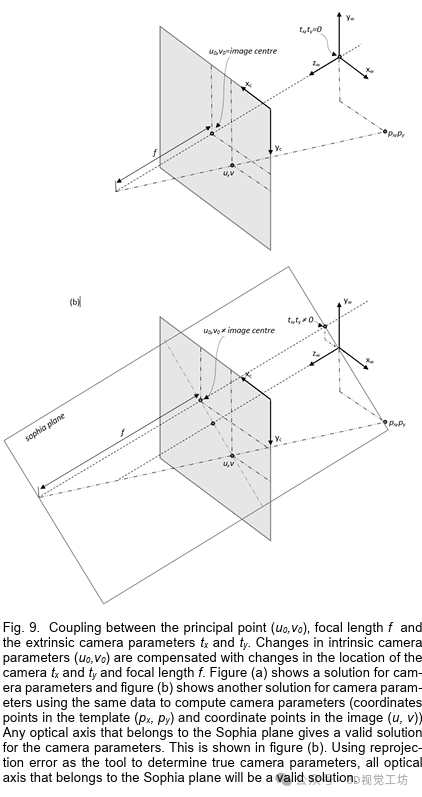
这篇文章主要讨论了相机标定过程中焦距变化的影响以及内外参数之间的相互依赖性。作者指出,在实际拍摄中,为了获得清晰的图像,镜头焦距会随着相机到物体的距离变化而调整,这种变化在传统的针孔模型中并未考虑,因此可能导致相机模型计算结果的偏差。此外,作者还指出了内参和外参参数之间的紧密耦合,说明了它们之间的相互影响。
为了解决这些问题,作者提出了改进的相机标定方法。首先,提出了一种相机模型,其中包含多个比例因子值,以准确表示相机在不同距离下的行为。其次,作者建议通过特定实验单独计算比例因子,以避免内外参数之间的干扰。最后,作者提出了一种解决非线性最小化问题的方法,仅计算外参参数、主点、扭曲和镜头畸变,而不是同时计算所有相机参数。
1 引言
相机标定过程中,相机焦点的变化对结果有着重要影响。传统的标定方法假设相机焦距恒定,但当相机与标定模板距离变化以及相机焦点调整以获得清晰图像时,这种假设会导致结果的偏差。本文提出了一种改进的相机标定方法,通过调整内部相机参数的计算顺序,并对内部和外部参数进行分别计算,以提高标定结果的准确性。通过实验验证,提出的方法能够获得更为精确的标定结果,从而提高了相机标定的稳健性。
2 现有相机标定过程使用二维模板的分析
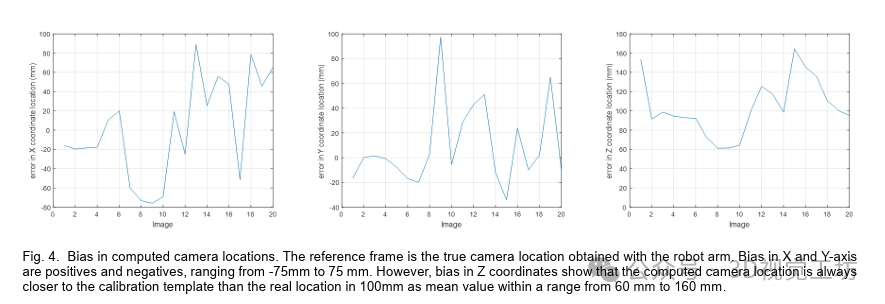
本文分析了使用二维模板的现有相机标定过程。该过程通常采用Zhang等人提出的方法,利用棋盘格模板的多个图像来计算相机的内部和外部参数。通过对标定过程的分析,发现在使用固定焦距的针孔模型时,存在焦距变化导致的偏差,进而影响了相机参数的准确性。此外,通过实证实验验证了标定结果中存在的偏差,尤其是相机位置参数的偏差。该偏差源于相机参数之间的耦合关系,导致在迭代优化过程中补偿了部分误差,使得重投影误差维持在较低水平。最后,文中提出了分析相机焦距变化对标定结果影响的原因,并对焦距变化如何导致重投影误差保持在接近零的水平进行了解释。
3 提出的使用二维模板的相机标定过程
本文提出了一种使用二维模板的相机标定过程,旨在改善现有相机标定方法中存在的问题。传统的相机标定方法通常包括两个步骤:首先,基于代数解的近似计算相机参数;其次,通过迭代非线性最小化问题,根据再投影误差的标准改进代数解,以计算正确的参数值。然而,现有方法在使用多个位置拍摄的图像进行相机标定时存在假设失败的问题。本文提出的方法通过识别超焦距距离来改善相机标定过程的解决方案,确保了标定的正确性。具体来说,本文的方法首先确定了超焦距距离,即焦距在距离超焦距距离后保持恒定,之前会随着物体与相机之间的距离变化而改变。然后,针对不同距离下的相机参数变化,提出了计算比例因子和外在相机参数的方法。这一过程涉及到非线性最小化问题,以调整相机参数,并将镜头失真模型纳入了最大似然估计中。最终的标定结果可用于保证相机在特定距离范围内获得清晰图像的质量,并且对于相机镜头失真也能够进行校正。总的来说,本文提出的相机标定过程使用二维模板,通过识别超焦距距离和计算比例因子及外在相机参数,能够有效地提高标定的准确性和稳定性,适用于不同距离下的图像拍摄。
4 实验
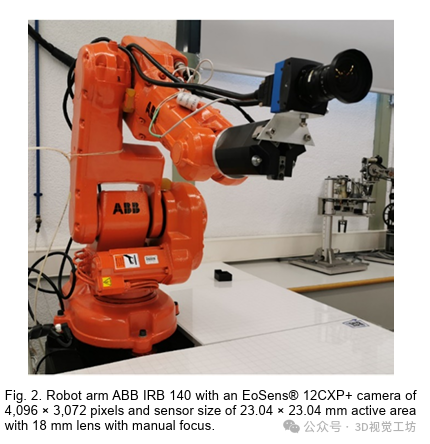
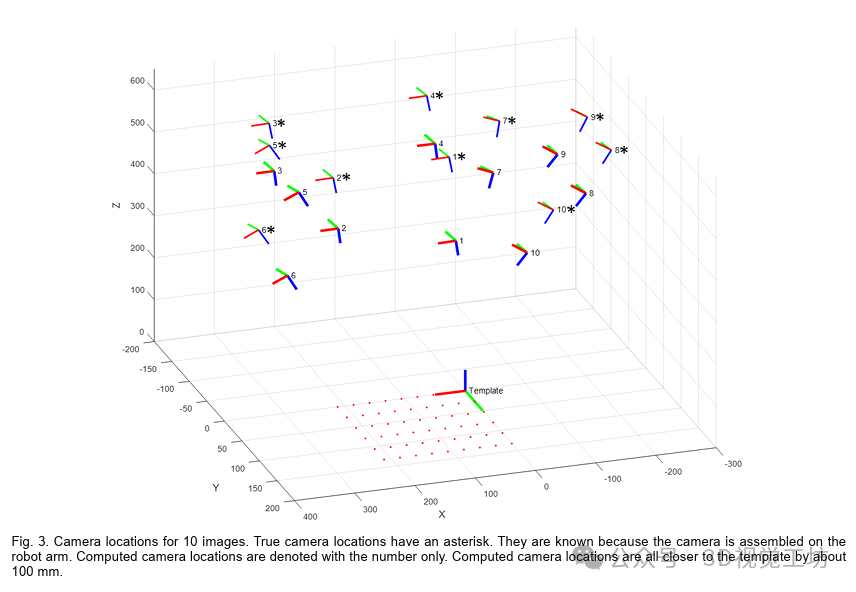
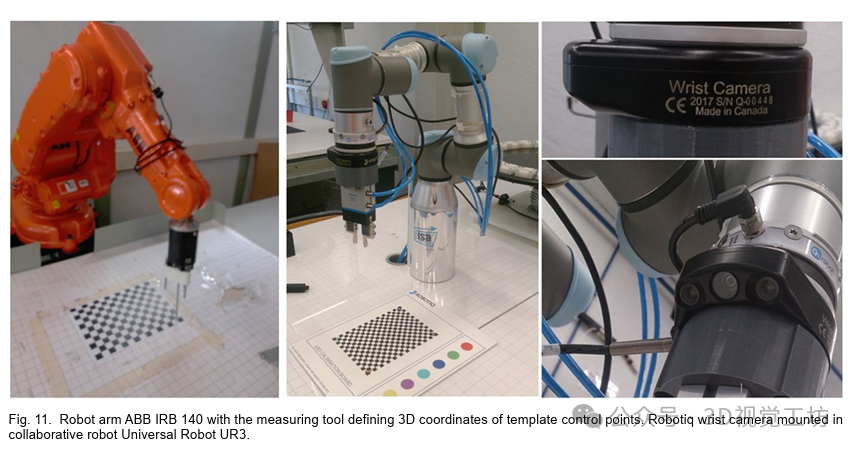
在该实验中,通过使用两个不同特征的相机在两个机器人手臂上捕获图像,展示了焦距对相机标定过程的影响。实验中使用的相机包括一个具有电动对焦功能的Robotiq手腕相机和一个具有手动对焦功能的EoSens® 12CXP+相机。实验目的在于比较相机标定过程中外参参数的计算结果与已知真实值的差异,并研究焦距变化对内参参数的影响。
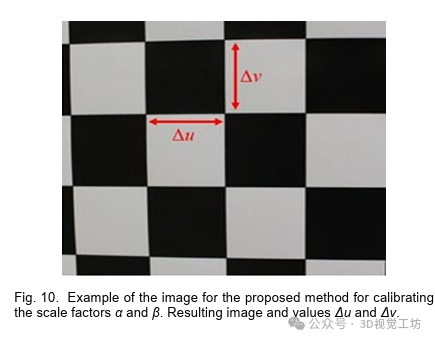
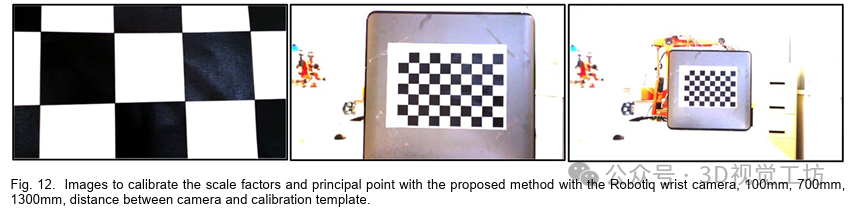
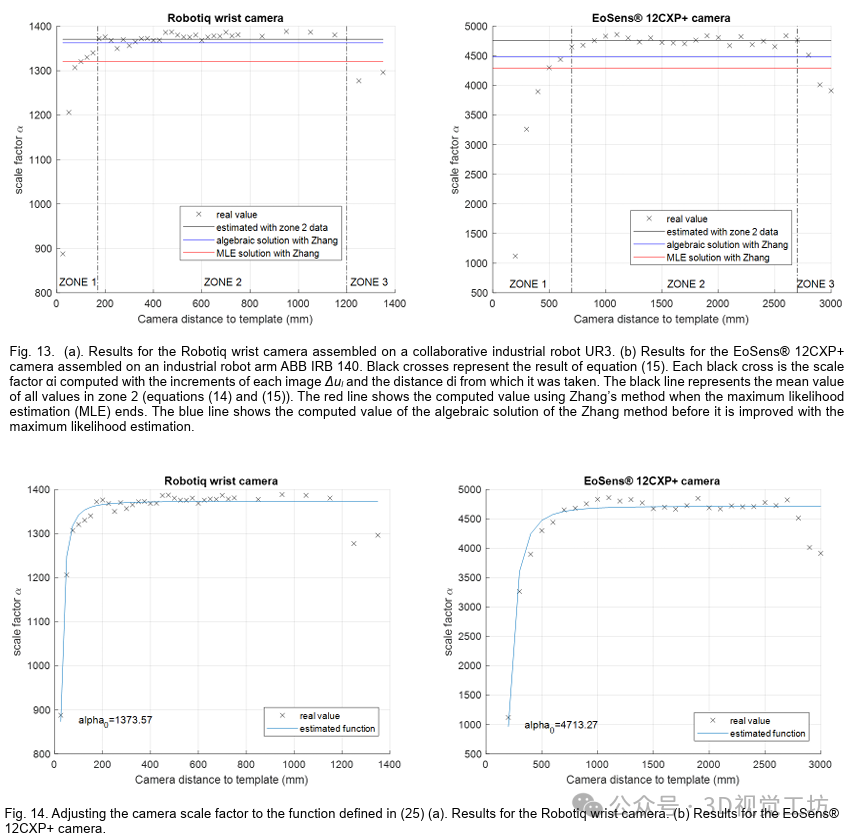
实验结果表明,在标定过程中,由于焦距在不同距离下会发生变化,因此需要使用多个相机模型来表示相机的对焦过程。在较大的传感器中,超焦距距离比在较小传感器中更远离相机,因此在较大传感器的相机中,存在更大的风险捕获具有不同焦距的图像进行标定,这可能导致有偏差的参数计算。实验结果还展示了通过计算比例因子α和β来估计相机模型的方法,以及在不同相机-模板距离下比例因子的变化情况。
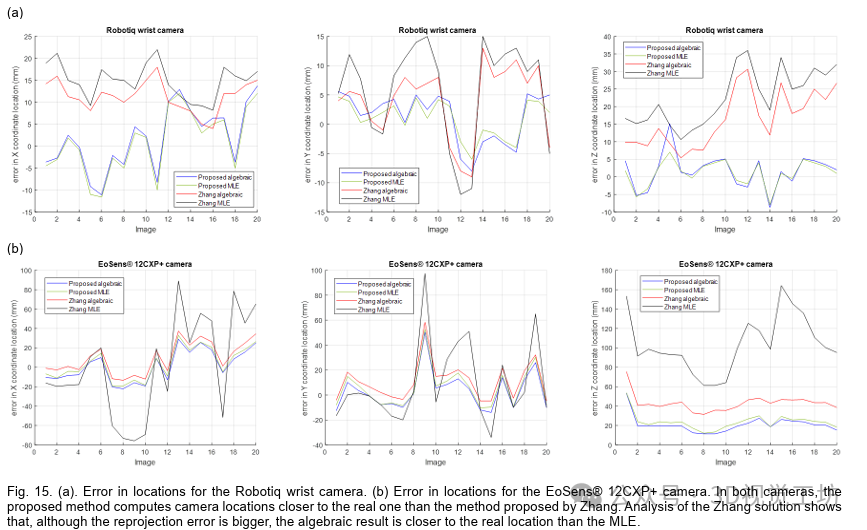
进一步的分析揭示了不同距离范围内的三个区域对相机标定的影响:区域1中,焦距随着距离的变化而变化,区域2中,焦距保持恒定,而区域3中,由于模板与相机距离较远,标定模板在图像中的质量较差,从而影响了比例因子的准确性。基于实验结果,提出了一种计算相机完整模型的方法,该方法可以根据不同比例因子计算相机模型,并通过最小化重投影误差来优化模型参数。相比之下,传统的张氏标定方法则存在参数耦合的问题,容易产生偏差结果。
5 总结
本文深入分析了焦距对相机标定过程的影响。为了获得图像中最清晰的物体,镜头根据相机到物体的距离进行调整,在每个图像中变化焦距。由于针孔模型不考虑这种变化,使用从不同距离拍摄的图像计算相机模型可能会得到不正确的结果。此外,对内参和外参参数之间的相互依赖性进行了详尽研究,证明它们之间耦合紧密。相机的焦距与相机到物体的距离相关联,主点与相机在场景中的位置X和Y相关联。因此,在迭代非线性最小化问题中同时计算所有相机参数通常不被认为是一个良好的实践。它基于重投影误差给出了一个有效的结果,但结果并不代表真实的相机。
相机标定过程在三个方面得到了改进。首先,提出了一个相机模型,其中根据相机到场景中物体的距离使用了多个比例因子的值。其次,比例因子是通过一个特定的、单独的实验计算的,以避免由于内参和外参相机参数之间的干扰而产生不正确的结果。第三,通过仅计算外参参数、主点、扭曲和镜头畸变来解决非线性最小化问题,而不是同时计算所有相机参数。改进后的方法考虑到了相机镜头存在多个设置点以获得清晰图像。因此,需要一个具有多个比例因子值的相机模型来准确表示相机行为。如果使用具有恒定比例因子值的模型,则需要知道相机和物体之间距离的范围,在这个范围内这些比例因子相机参数才有效,或者相反,捕获标定模板的图像在一个对应用程序有效的距离范围内。此外,为了避免内参和外参相机参数之间的耦合效应,建议进行特定测试来分别计算每个相机参数,而不是尝试通过同时计算所有参数来解决非线性最小化问题。同时在非线性最小化过程中计算所有相机参数会产生偏差结果。在未来的工作中,可以考虑改进方法以更准确地计算相机主点。目前,所提出的方法是相机标定领域的一大进步,将在相机参数表示关键步骤的任何应用中提供帮助。
声明:权归原作者所有,仅供学术分享,如有侵犯请联系删除。

