3D视觉工坊
3D视觉工坊




点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达

01 什么是工业相机


02 工业相机与单反相机的区别
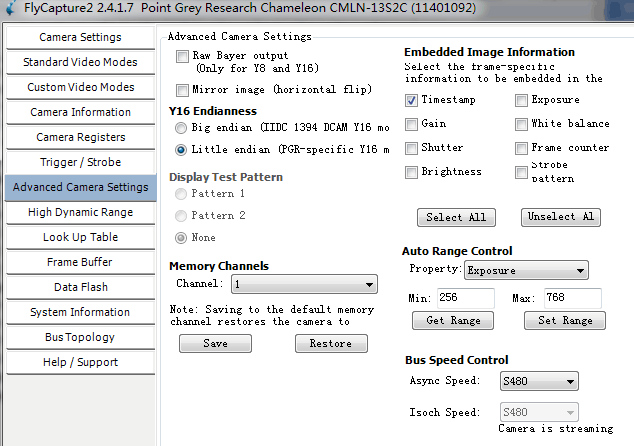
配备专门软件开发工具包(Software Development Kit,SDK),我们可以通过代码设置包括:曝光时间、触发方式、图像分辨率、成像帧率等等一系列相机参数(下面是某款相机SDK的图像界面)。
成像精准:一般来说,工业相机的图像传感器是逐行扫描的,而普通传感器是隔行扫描的,前者生产工艺更为复杂,成品率低、出货量少,世界上只有少数公司能够提供这类产品。此外,工业相机的畸变、色彩还原准确度往往更好,而单反相机追求的是要拍的好看。 稳定性和可靠性:工业相机的性能稳定可靠、易于安装,结构紧凑结实不易损坏,连续工作时间长,可在较差的环境下工作,这是单反相机做不到的。
例如一些工业相机被安装在工业检测生产线上,负责产品的视觉测量、缺陷筛查等工作,这就要求相机在流水线常年连续运转过程中保证不出故障,否则会导致生产线停摆甚至瘫痪,这对企业来说意味着难以挽回的经济损失。
严苛场景:比如某些在航空上用的相机,其工作温度范围就要求:-40℃~85℃; 成像速度:拍摄汽车碰撞、原子弹爆炸的高速相机; 光谱范围:比如测量钢炉内铁水温度的红外相机;
03 工业相机的接口

镜头接口:固定相机跟镜头,也称为卡口; 数据接口(控制):传输拍摄到的相机数据(控制相机); 电源接口(控制):提供相机电源(控制相机);
3.1 镜头接口

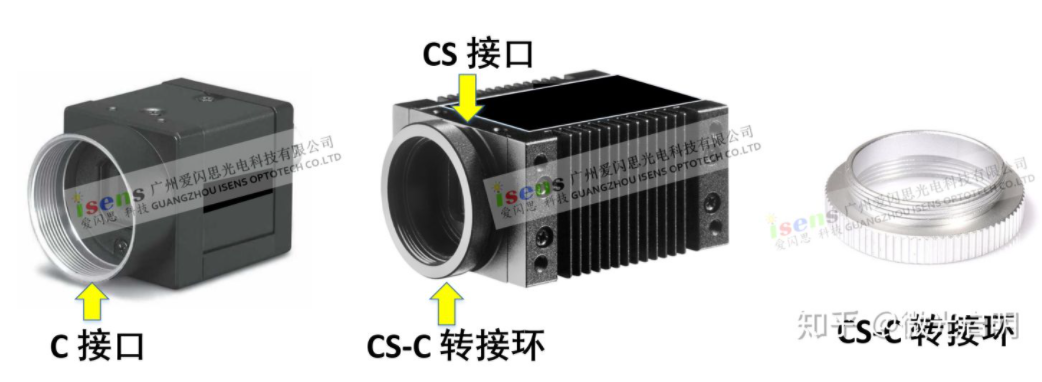
1)C、CS接口
2)M系列
 |  |  |
3)卡扣系列
 |  |
4)常见镜头接口参数
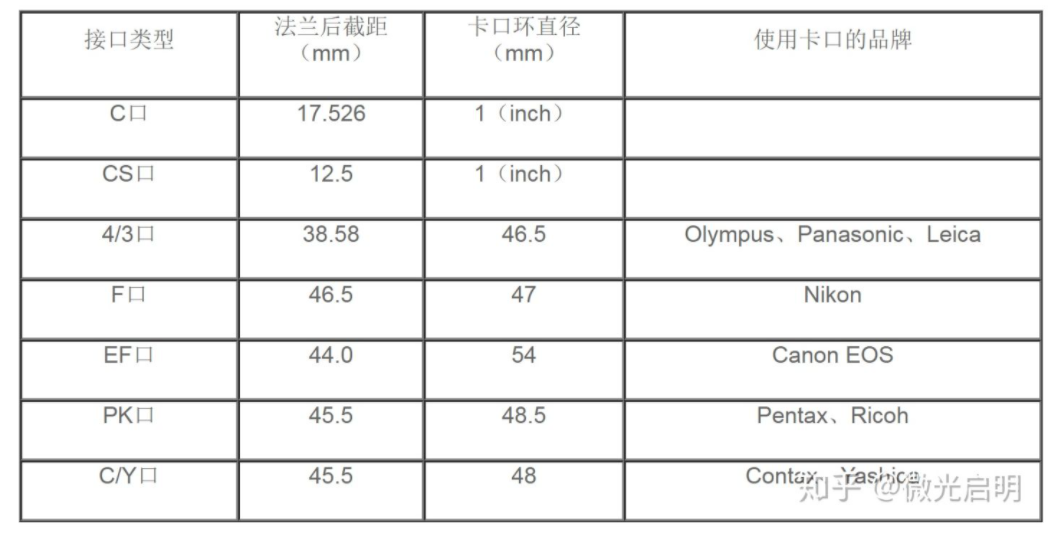 |
3.2 数据+电源 接口
 |
 |
USB2.0、3.0系列:这类接口的好处是即插即用(虽然这里说是即插即用,但一般工业相机都还是要安装驱动以及相应的SDK才能调用的),3.0的速度达到了5.0GB,但问题是传输的线路太短,不太适合长距离、大批量工业相机的应用场景(这在大多数化工企业中是这样,相机安装在工厂的各个角落,处理放在主控室)。 IEEE1394:Apple公司推出的标准,传输速度介于USB2.0~3.0之间(还是比较慢的),传输距离达到了100m,但是其需要额外的转接头,因此应用也不多。 GIGE:也就是常说的网口相机,传输速度虽然不高(一般来说也够用了),但是传输距离远,集成方便,配合上千兆路由器,可以实现大规模的工业相机集成,目前工业应用上最为广泛,较为高端的工业相机也大多采用这种配置,唯一的缺点是需要额外的电源供电。 Cameralink:一种专门的工业级视觉产品使用行业标准,传输速度可以达到5.44Gbit/s,往往用在之前的一些高速相机上(因为之前USB2.0、GIGE这些接口都太慢了),但缺点是需要额外的图像采集卡、价格贵(一条线缆1000)、而且不好用,要自己去写相机驱动,并且不支持热插拔(会损坏相机!)。 原因:使用这类接口的相机在物理上被硬生生地拆为两部分,相机的厂商只负责相机的制造,而相应的驱动、软件,比如说图像的采集、处理等算法都需要你自己对CameraLink采集卡进行编程。 CiaXPress:速度快、传输距离远,独立供电、价格也便宜,推出来用以取代Cameralink接口。这类相机需要额外的接口卡,注意,这里是接口卡!接口卡不同于采集卡,其只是相机采集到的数据的一个中转站,不会对数据做任何处理,其直接将数据存储在主寄存器中。 因为这类相机传输速度较快,如果将拷贝数据的工作交给CPU来做的话,CPU将会消耗大量资源.
04 镜头参数
4.1 焦距
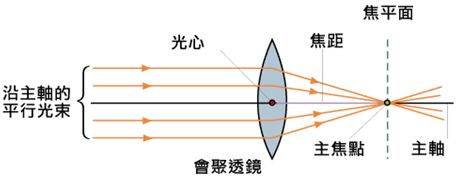
1)物理焦距
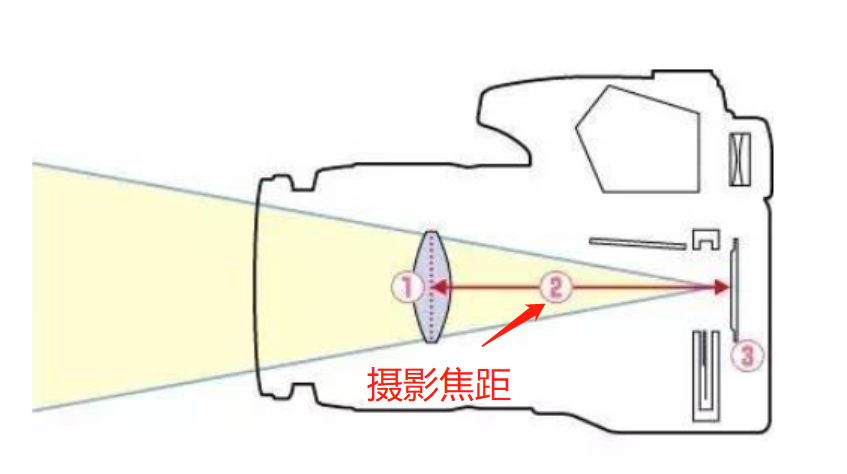
2)摄影焦距
3)调焦原因
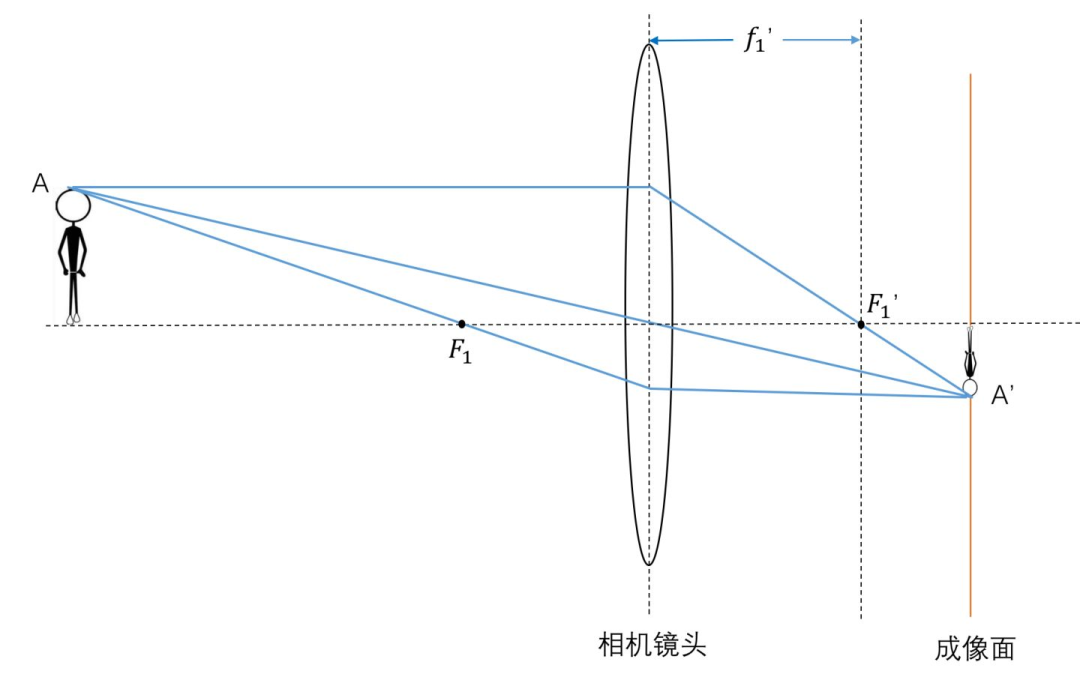
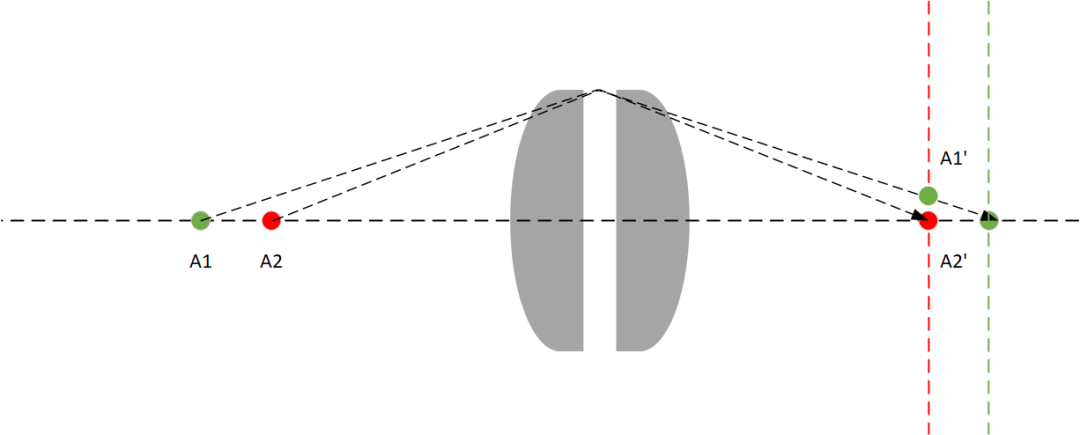
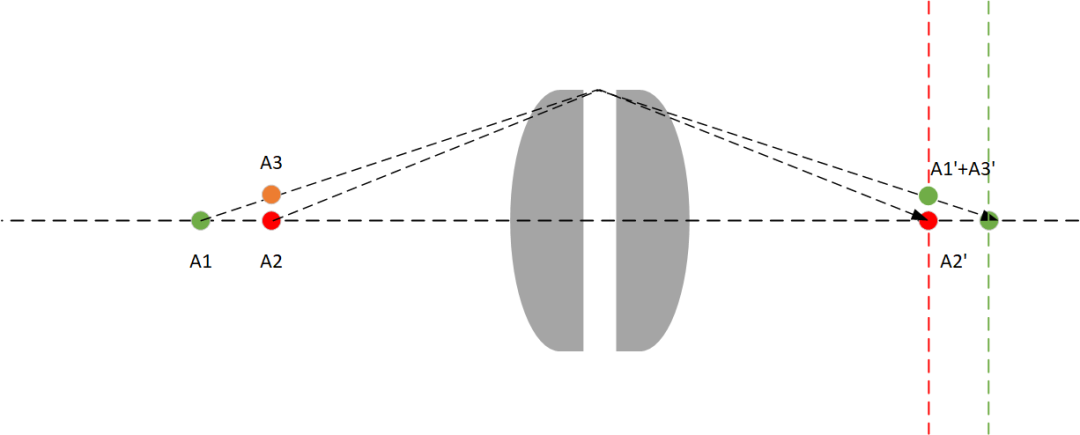
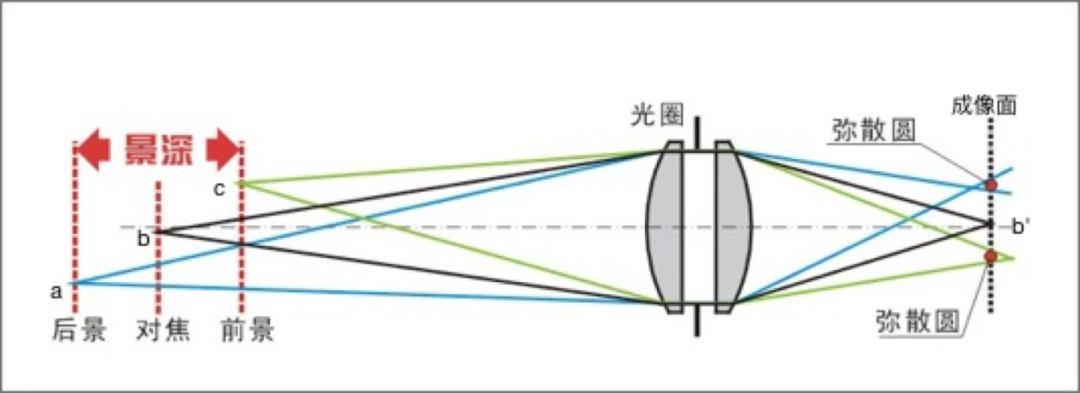
同一点发出的各个方向的光线,经过镜头后必定汇聚于同一点; 同一平面上的不同点发出的光线,经过镜头后,汇聚于不同点;
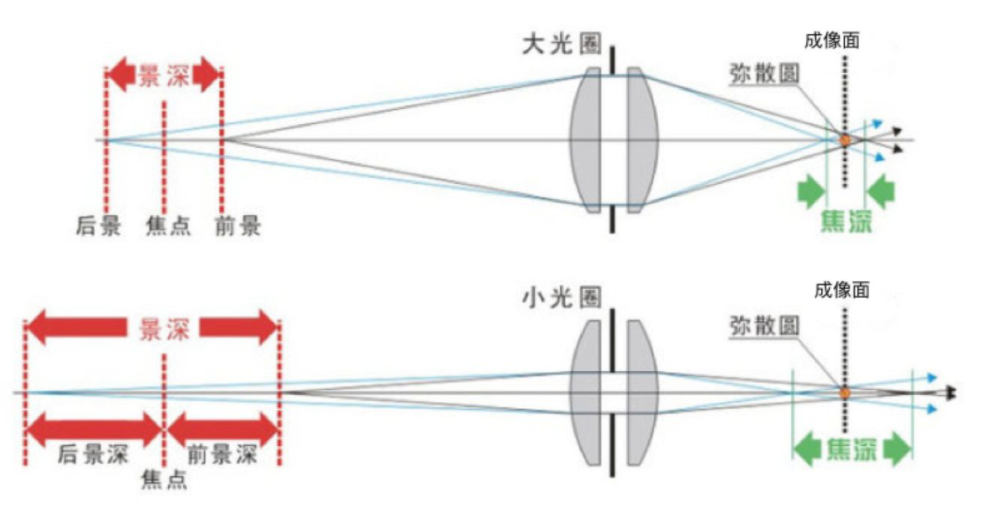
4.2 景深

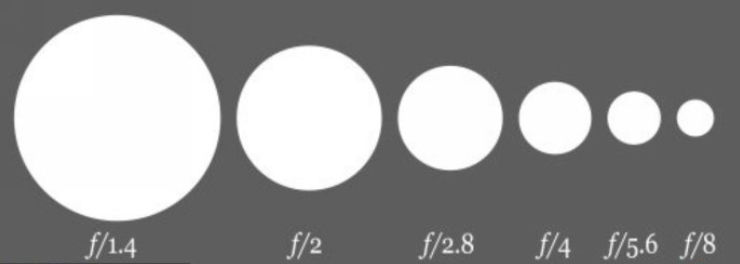
4.3 光圈
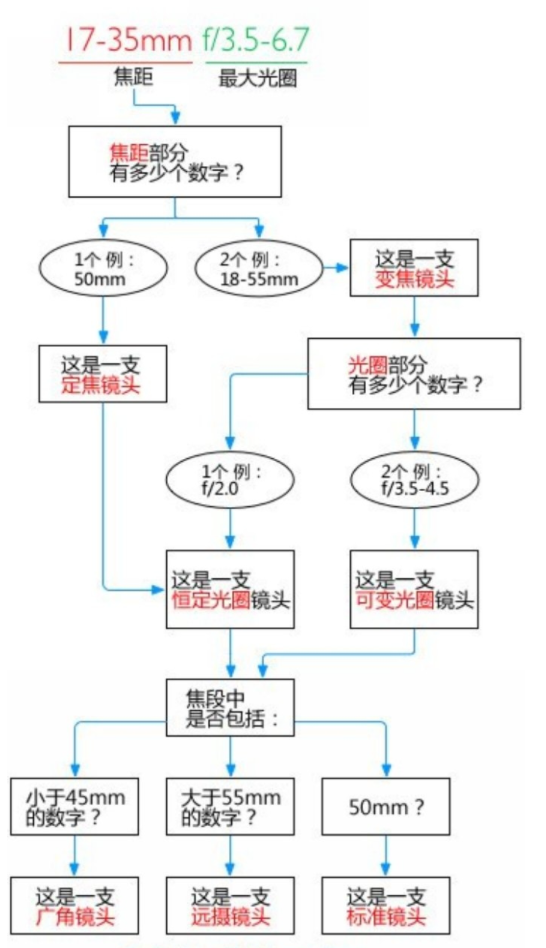
4.4 常见镜头标识
05 相机参数
分辨率 相机每次采集图像水平和竖直方向的像素点数,对应于CCD水平和竖直方向排列的感光元的个数,常见的分辨率有:。 像元大小 单个像素的物理尺寸大小,一般来说,像元尺寸越小,制造难度越大,图像质量也越不容易提高。目前工业数字相机像元尺寸一般为3~4 。 靶面尺寸 通常厂家会告诉你实际CCD的靶面尺寸,其并不完全等于分辨率 像元大小,常见的相机靶面尺寸查询http://shixinhua.com/camera/2012/06/7.html。 像元大小和像元数(分辨率)两者共同决定相机靶面的大小,是此消彼长的关系,所以我们选择相机的时候也并不是分辨率越高越好,而是挑选合适的分辨率。 像素深度 每个像素的位数,含义如下,比如说一副灰色图像的像素深度为 8 bit,那么意味着它有 级灰度(对于三通道的彩色图像来说,意味着 种颜色)。常见的像素深度有 8、10、12 bit。像素深度过浅,会使图像看起来不自然。而增加像素深度可以增加测量的准确性,但是也会降低系统的速度,并且提高系统集成的难度。 知道了像素深度概念,你就能明白为什么大多数工业相机都是黑白相机了吧? 最大帧率/行频 相机采集和传输图像的速度,一般来说有两种类型相机: 面阵相机:每秒采集的帧数(Frames/Sec); 线阵相机:每秒采集的行数(HZ); 曝光方式 线阵相机:逐行曝光,有固定行频和外触发同步形式; 面阵相机:帧曝光、场曝光、滚动曝光等形式,也提供外触发同步形式; 所谓外触发同步,指的是外部给一个信号,相机即开始拍摄图像。 曝光时间 也称为快门速度,指从快门打开到关闭的时间间隔,在这一段时间内,物体可以在底片上留下影像。曝光时间 快门速度共同决定了曝光量。曝光时间不能设置太长,其会增加照片的底噪,也不能设置太短,会导致曝光不足,要看需要而定:在暗光条件下,比如说拍星星,曝光时间就要设置几个小时。而在亮光情况下,拍摄运动的汽车,曝光时间就不能设置太长,否则会行成残影。 光谱响应特性 指传感器对不同光波的敏感特性,一般来说,响应范围都在350nm~1000nm间。有的相机在靶面前面会增加一个滤镜,滤除红外线,如果系统需要多红外光感应,可以去除该滤镜。 信噪比 相机的信噪比定义为图像中信号与噪声的比值,代表了图像的质量,图像信噪比越高,相机性能和图像质量越好。
06 相机和镜头选取
工作距离(Working distance, WD):镜头最外端到被测物体距离。 视场范围(Field of View, FV):实际拍摄到区域尺寸。 视场角(Angle of View, FOV):影响理论视场范围。
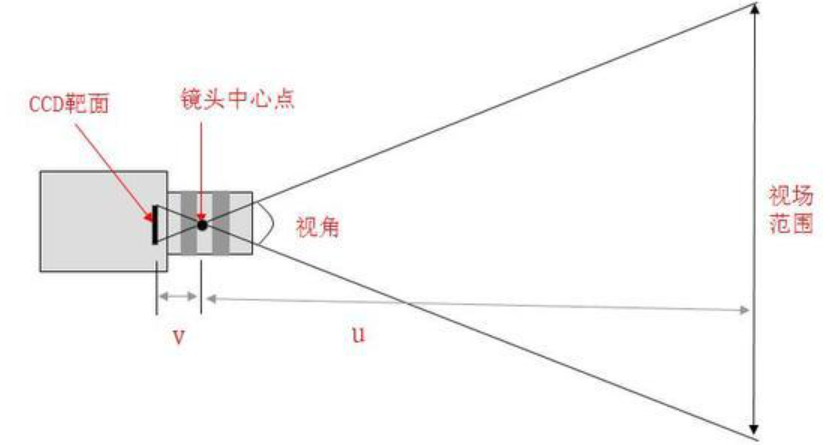
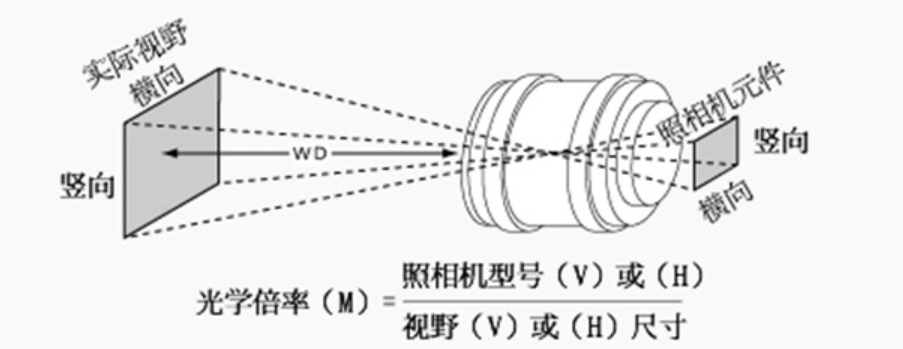
光学放大倍数(Magnification, B):芯片尺寸除以视野范围;
CCD or CMOS CCD 提供更好的图像质量、抗噪能力,CMOS体积更小,但噪声会更多一点。当然,这不是绝对的,还是钱决定的。 CCD尺寸 有钱的话,尽量买大一点的。 合适的分辨率 对于视野范围为 ,要求测量精度为 ,那么横/竖放下的分辨率至少为 像素,通过我们不会用一个像素对应一个测量精度,一般选择倍数为4、甚至更高,这样相机单方向的分辨率为 ,相机的分辨率:。
足够的相机帧率 当被测物体有运动要求,相机的帧率不能太低,对于一些高速运动的物体,可以选择
镜头接口: 跟相机接口匹配,也可以外加转换口后匹配,并且镜头可支持的最大CCD尺寸应大于选配相机CCD尺寸大小。 镜头焦距 根据相机CCD尺寸、工作距离、视场大小(物体的高/宽)计算所需镜头的焦距,如下: 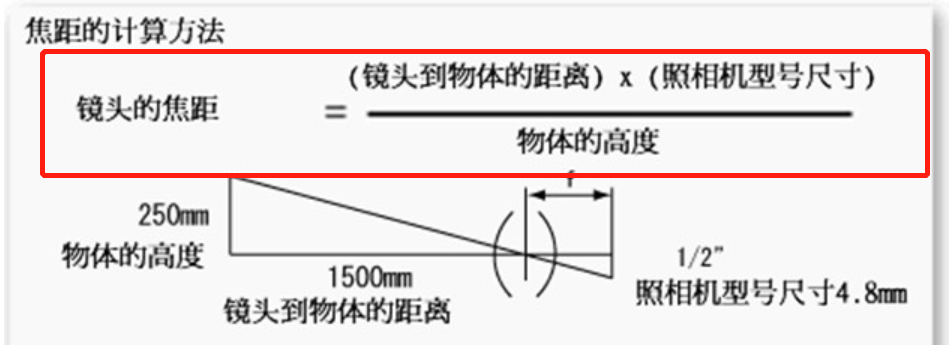
图24 根据CCD尺寸、工作距离、视场大小计算所需的镜头焦距 镜头光圈范围 光圈大小决定图像亮度,在拍摄高速运动物体、曝光时间很短的应用中,应选用大光圈镜头以提高图像亮度。
07 附录
[1]工业相机与单反相机的区别 <知乎,微光启明,国防科技大学,工学博士>:https://zhuanlan.zhihu.com/p/95829433 [2]工业相机镜头接口类型 <知乎,微光启明,国防科技大学,工学博士>:https://zhuanlan.zhihu.com/p/100984490 [3]工业相机数据接口标准 <电子发烧友,judyzhong>:http://www.elecfans.com/dianzichangshi/20171117581055.html [4]工业相机和镜头主要参数 <CSDN,非凡初来乍到>:https://blog.csdn.net/qq_38241538/article/details/84106969 [5]相机镜头工作原理图解<Paincker,学习思考>:https://www.paincker.com/how-the-lens-works
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿 
▲长按关注公众号
▲长按关注公众号
觉得有用,麻烦给个赞和在看~