
机械臂的轨迹规划,路径规划,运动规划有什么区别呢?
共 1146字,需浏览 3分钟
· 2022-11-21
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
先解决定义问题。名词定义不重要,但是我们有必要了解它们可能涉及机器人研究中的哪些工作。
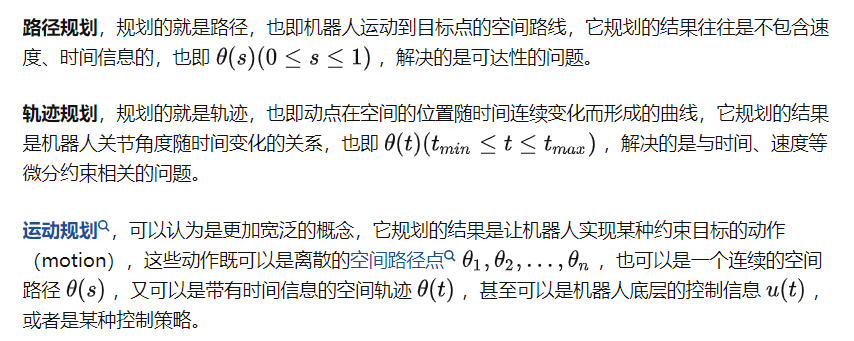
再解决这些工作之间的关系问题。
机器人底层控制最终需要的就是一堆电流控制指令,所以,不管是什么任务,最终都需要翻译成每个电机的控制指令。
但是,由于不同任务的硬件平台、任务需求、约束不同,所以,可能会不同层次地将任务进行分解。
对于最简单的任务,只要求机器人从A运动到B,中间避开障碍物,而不用考虑运动时间等问题。
这时候,基本上规划部分只需要进行路径规划即可:规划器输出一条几何路径θ(s),发送给机器人控制器,机器人控制器自行进行路径点之间的轨迹插补(如T型速度曲线、样条插值等)。
计算得到θ(t),并通过PID 之类的闭环控制算法转换电机控制指令,控制机器人完成任务。例如,之前的一个回答,要求机器人运动的时候避开相机视野区域,就是这样的问题:
https://www.zhihu.com/question/373986440/answer/1037013860
https://www.zhihu.com/zvideo/1316438365613236224
另一方面,不同任务,即使在其空间路径相同的情况下,也可能对轨迹有不同的要求。
例如,有些任务要求机器人的运动时间最短,有些任务要求机器人的运动节拍固定,有些任务要求机器人的末端匀速运动。
甚至是,从运动平稳性考虑,需要规划出速度、加速度、甚至是加速度连续的轨迹。对于这类任务,仅做路径规划就无法满足要求,往往需要路径规划与轨迹规划相结合。
对于这类任务,可以先进行路径规划,获得满足任务的空间路径,之后再进行轨迹插补,获得需要的轨迹后,通过实时通讯的方式,将轨迹发送给机器人控制器,通过闭环控制,得到电机控制指令。
下面的视频是相同的路径,但是不同的轨迹规划结果。分别是时间最优、节拍固定和末端匀速的轨迹:
《不同约束下得到的不同轨迹》
https://www.zhihu.com/zvideo/1316437536278429696
但是,如果机器人的运动轨迹需要满足某种动力学约束,那么,往往需要规划器直接计算出符合约束的轨迹,而不是分为路径规划和轨迹插补两部分。
对于某些任务,规划的时候,环境的状态不完全可观或者说环境可能发生变化。
这时候,需要的是某种运动策略,输入当前的环境与机器人状态 s,输出当前时刻的控制指令 u。
很多强化学习的工作,其实就是在做这类工作,通过 DRL 去学习不同状态下的控制策略。
所有上面这些场景,都可以是运动规划的范畴。
本文转载自知乎:
https://www.zhihu.com/answer/1601792996
本文仅做学术分享,如有侵权,请联系删文。