
华为天才少年稚晖君自制硬萌机器人,开源 5 天,GitHub 收获 2900 星!
C语言题库
共 3102字,需浏览 7分钟
· 2022-05-10


「电子」机器人如何造?




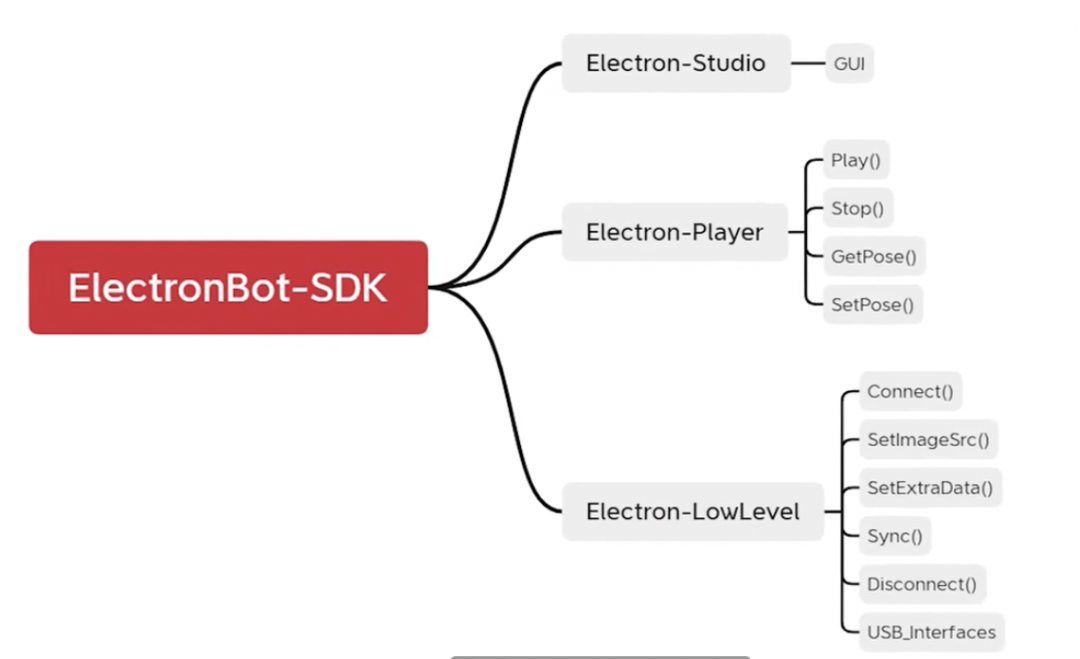


代码开源
网友:重新定义「软核」

参考资料:
版权申明:内容来源网络,版权归原创者所有。除非无法确认,都会标明作者及出处,如有侵权,烦请告知,我们会立即删除并致歉!
评论
华为天才少年稚晖君自制硬萌机器人,开源 5 天,GitHub 收获 2900 星...
这是「进击的Coder」的第 590 篇分享来源:新智元“ 阅读本文大概需要 7 分钟。 ”你们还记得上次那个「全栈自研」的给葡萄缝针的钢铁侠机械臂 Dummy 吗? 近 3 个月没更的华为「天才少年」稚晖君带着他的最新视频来...
FightingCoder
0
“天才少年” 稚晖君被曝离职华为,或投身机器人领域
羿阁 萧箫 发自 凹非寺量子位 | 公众号 QbitAI 以“天才少年”身份加入华为的稚晖君,被曝已经离职,将开启创业! 虽然本人还没公开确认这一消息,但据华为员工爆料,目前华为内部已经搜不到对应的工号。 要知道,这两...
程序IT圈
0