
多任务学习中的网络架构和梯度归一化
数据派THU
共 3270字,需浏览 7分钟
· 2022-04-24

来源:DeepHub IMBA 本文约2600字,建议阅读5分钟
本文介绍了多任务学习中的网络架构与梯队归一化。
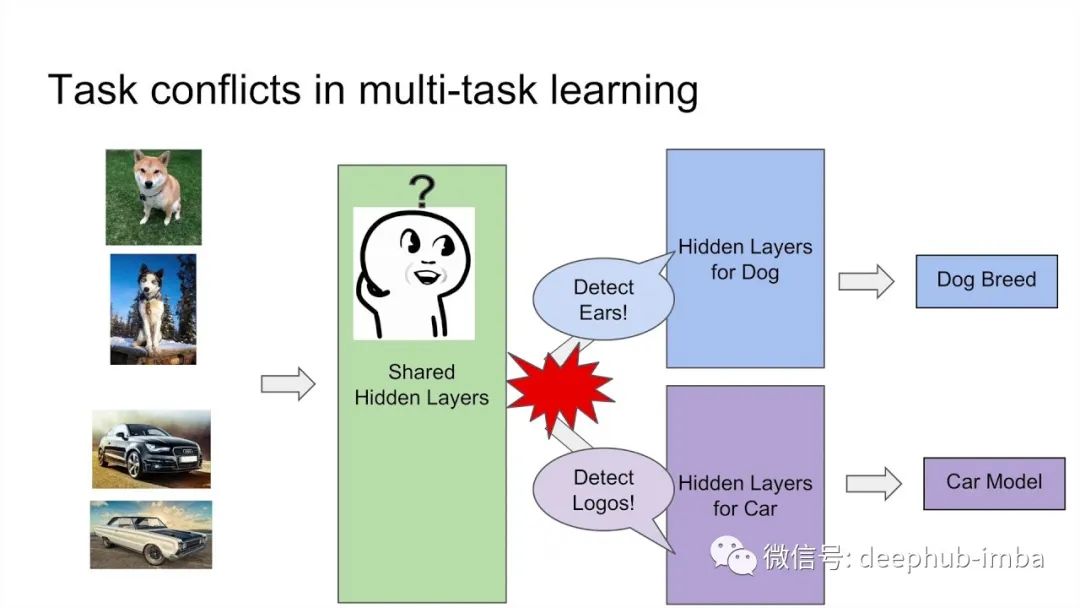
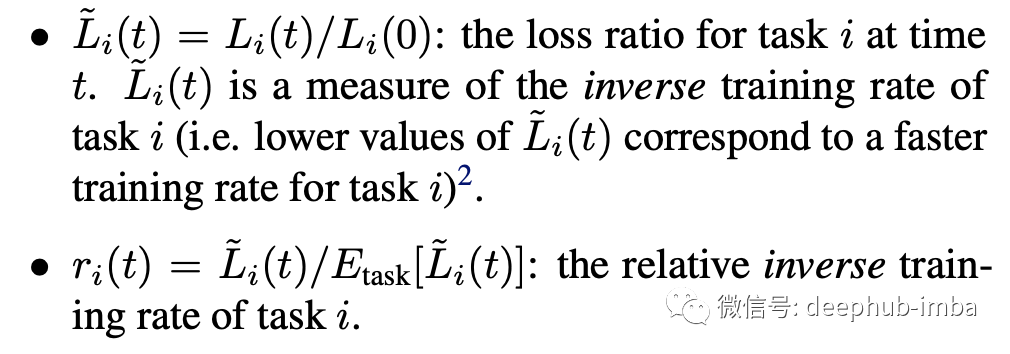
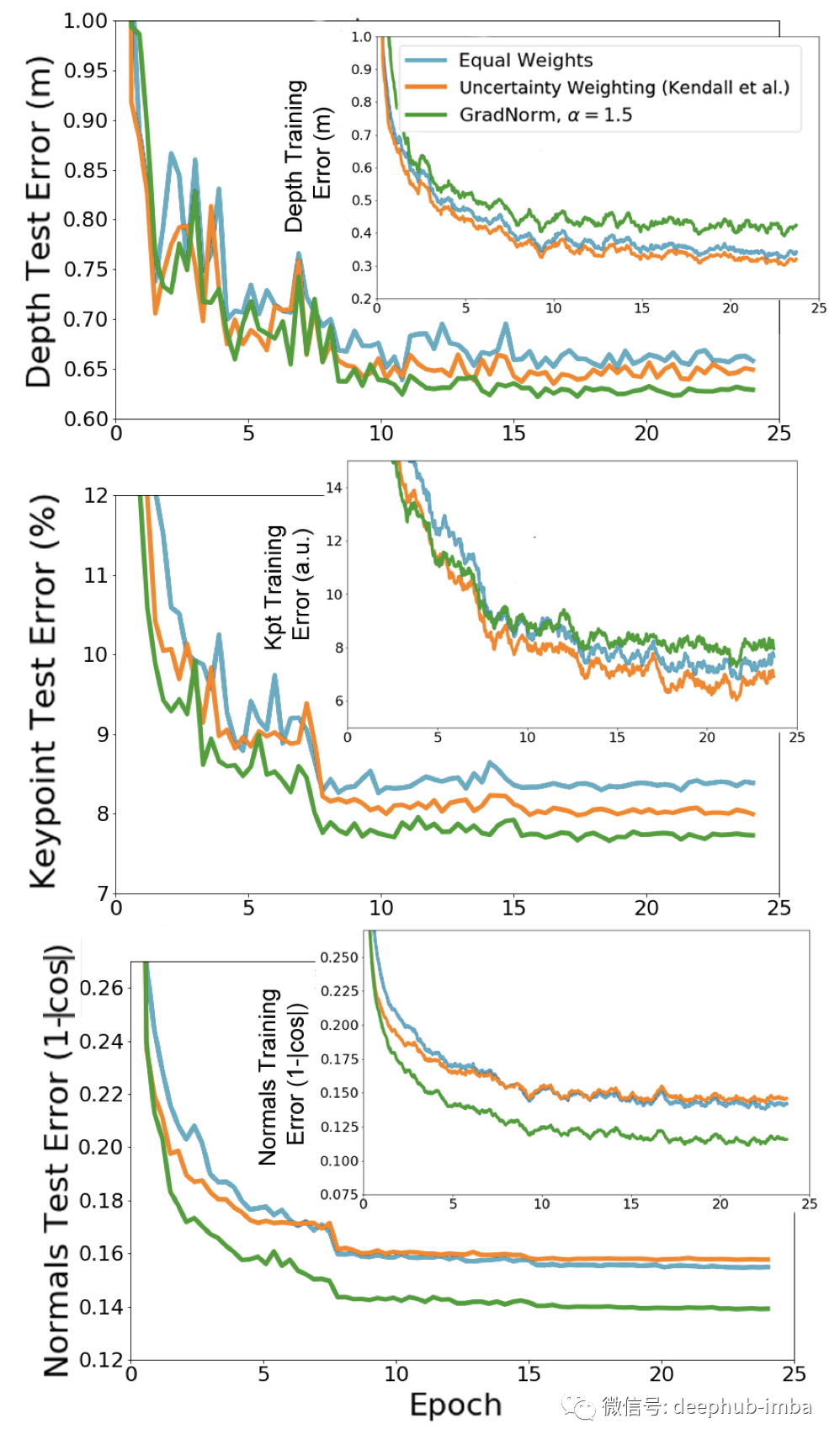
多任务学习中的优化




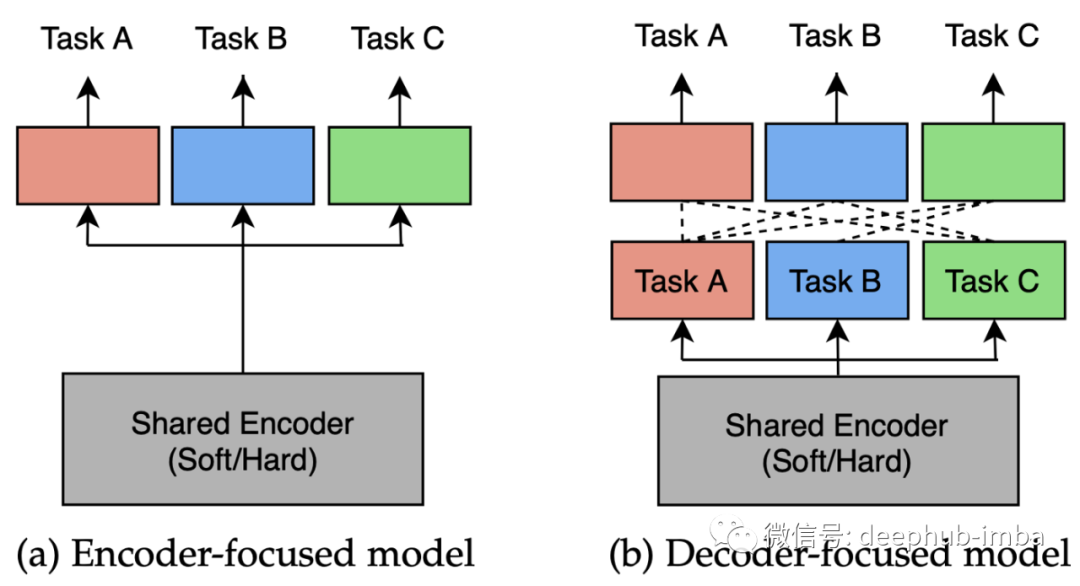
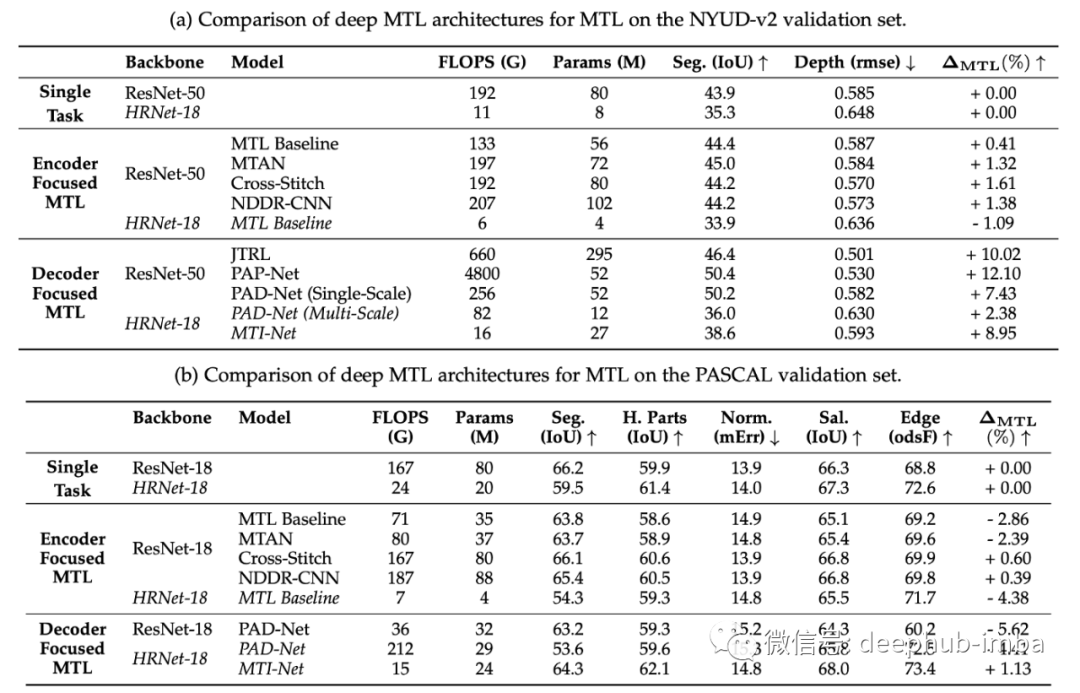
深度多任务学习架构

深入研究
引用
[1] GradNorm: Gradient Normalization for Adaptive Loss Balancing in Deep Multitask Networks, arxiv 1711.02257
[2] Multi-Task Learning for Dense Prediction Tasks: A Survey, arxiv 2004.13379
编辑:王菁
校对:杨学俊
评论
PaddlePALMNLP 大规模预训练和多任务学习框架
PaddlePALM (PArallel Learning from Multi-tasks) 是一
PaddlePALMNLP 大规模预训练和多任务学习框架
0