小白学视觉
小白学视觉




点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
01.简介
如果小伙伴也遇到了类似情况,那么这篇文章可能会对大家有一定的帮助。
从3.0版开始,OpenCV包含了cv2.fisheye可以很好地处理鱼眼镜头校准的软件包。但是,该模块没有针对读者的相关的教程。
02.相机参数获取
校准镜头其实只需要下面2个步骤。
利用OpenCV计算镜头的2个固有参数。OpenCV称它们为K和D,我们只需要知道它们是numpy数组外即可。
通过K和D对图像进行去畸变矫正。
计算K和D
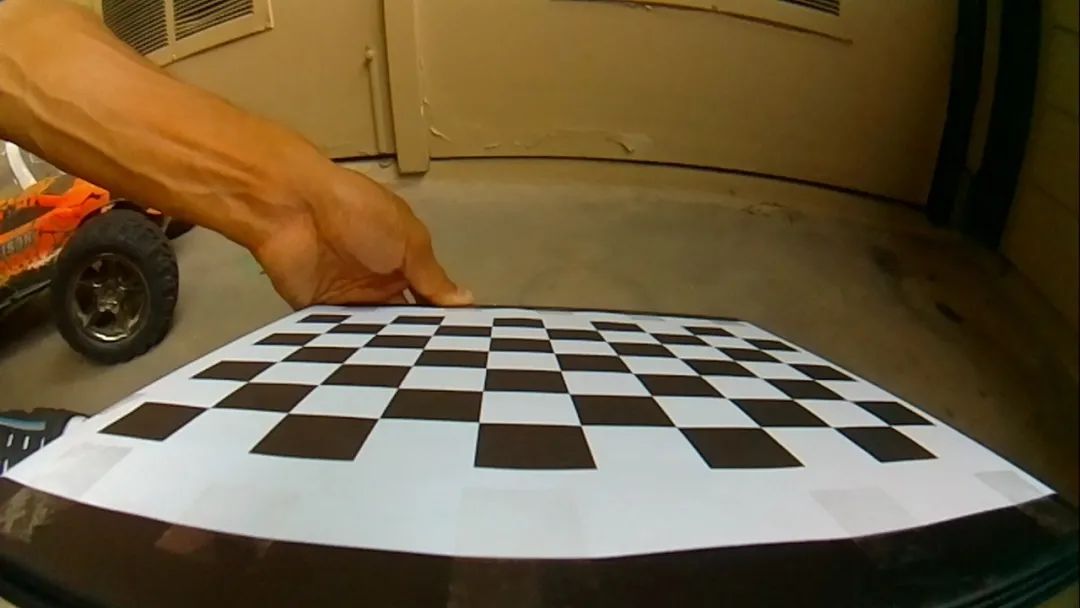
下载棋盘格图案并将其打印在纸上(字母或A4尺寸)。大家要尽量将这张纸粘在坚硬且平坦的物体表面,例如一块硬纸板上。因为这里的关键是直线必须是直线。
将图案放在相机前面拍摄一些图像,图案要取在不同的位置和角度。这里的关键是图案需要以不同的方式出现失真(以便OpenCV尽可能多地了解镜头相关参数)。
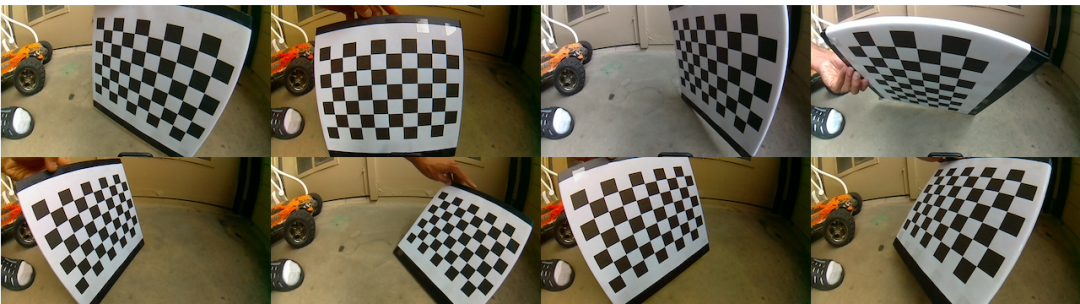
我们先将这些图片保存在JPG文件夹中。
现在我们只需要将此Python脚本片段复制到calibrate.py先前保存这些图像的文件夹中的文件中,就可以对其进行命名。
import cv2assert cv2.__version__[0] == '3', 'The fisheye module requires opencv version >= 3.0.0'import numpy as npimport osimport globCHECKERBOARD = (6,9)subpix_criteria = (cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 0.1)calibration_flags = cv2.fisheye.CALIB_RECOMPUTE_EXTRINSIC+cv2.fisheye.CALIB_CHECK_COND+cv2.fisheye.CALIB_FIX_SKEWobjp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32)objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)_img_shape = Noneobjpoints = [] # 3d point in real world spaceimgpoints = [] # 2d points in image plane.images = glob.glob('*.jpg')for fname in images:img = cv2.imread(fname)if _img_shape == None:_img_shape = img.shape[:2]else:assert _img_shape == img.shape[:2], "All images must share the same size."gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)# Find the chess board cornersret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, cv2.CALIB_CB_ADAPTIVE_THRESH+cv2.CALIB_CB_FAST_CHECK+cv2.CALIB_CB_NORMALIZE_IMAGE)# If found, add object points, image points (after refining them)if ret == True:objpoints.append(objp)cv2.cornerSubPix(gray,corners,(3,3),(-1,-1),subpix_criteria)imgpoints.append(corners)N_OK = len(objpoints)K = np.zeros((3, 3))D = np.zeros((4, 1))rvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]tvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)]rms, _, _, _, _ = \cv2.fisheye.calibrate(objpoints,imgpoints,gray.shape[::-1],K,D,rvecs,tvecs,calibration_flags,(cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 1e-6))print("Found " + str(N_OK) + " valid images for calibration")print("DIM=" + str(_img_shape[::-1]))print("K=np.array(" + str(K.tolist()) + ")")print("D=np.array(" + str(D.tolist()) + ")")
运行python calibrate.py。如果一切顺利,脚本将输出如下内容:
Found 36 images for calibrationDIM=(1600, 1200)K=np.array([[781.3524863867165, 0.0, 794.7118000552183], [0.0, 779.5071163774452, 561.3314451453386], [0.0, 0.0, 1.0]])D=np.array([[-0.042595202508066574], [0.031307765215775184], [-0.04104704724832258], [0.015343014605793324]])
获得K和D后,我们可以对以下情况获得的图像进行失真矫正:我们需要取消失真的图像与校准期间捕获的图像具有相同的尺寸。也可以将边缘周围的某些区域裁剪掉,来保证使未失真图像的整洁。通过undistort.py使用以下python代码创建文件:
# You should replace these 3 lines with the output in calibration stepDIM=XXXK=np.array(YYY)D=np.array(ZZZ)def undistort(img_path):img = cv2.imread(img_path)h,w = img.shape[:2]map1, map2 = cv2.fisheye.initUndistortRectifyMap(K, D, np.eye(3), K, DIM, cv2.CV_16SC2)undistorted_img = cv2.remap(img, map1, map2, interpolation=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT)cv2.imshow("undistorted", undistorted_img)cv2.waitKey(0)cv2.destroyAllWindows()if __name__ == '__main__':for p in sys.argv[1:]:undistort(p)
现在运行python undistort.py file_to_undistort.jpg。
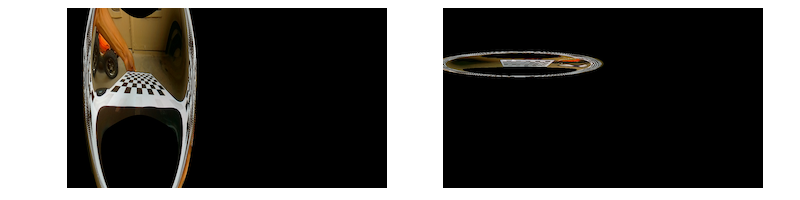
矫正前
矫正后
如果大家仔细观察,可能会注意到一个问题:原始图像中的大部分会在此过程中被裁剪掉。例如,图像左侧的橙色RC汽车只有一半的车轮保持在未变形的图像中。实际上,原始图像中约有30%的像素丢失了。小伙伴们可以思考思考如果我们想找回丢失的像素该这么办呢?
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~