新机器视觉
新机器视觉




点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
1. Introduction
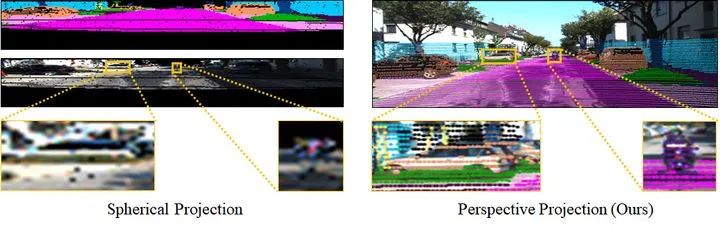
2. Motivation

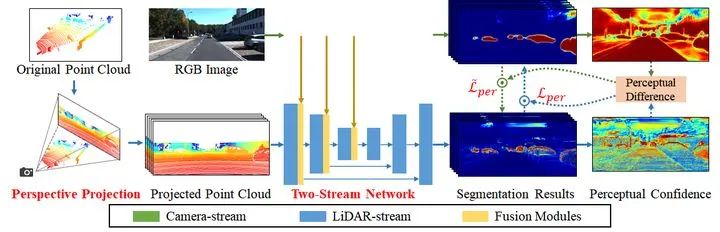
3. Method
3.1. Overview
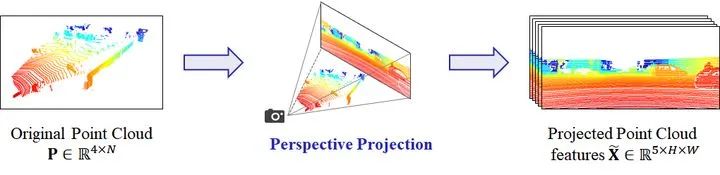
3.2. 模块一:Perspective projection
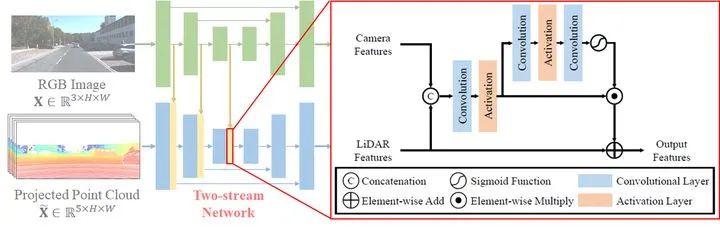
3.3. 模块二:Two stream network with residual-based fusion modules
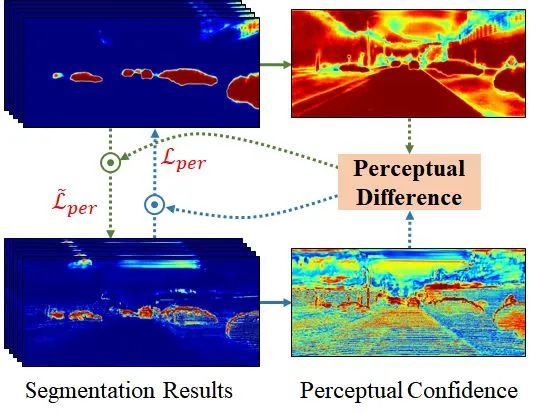
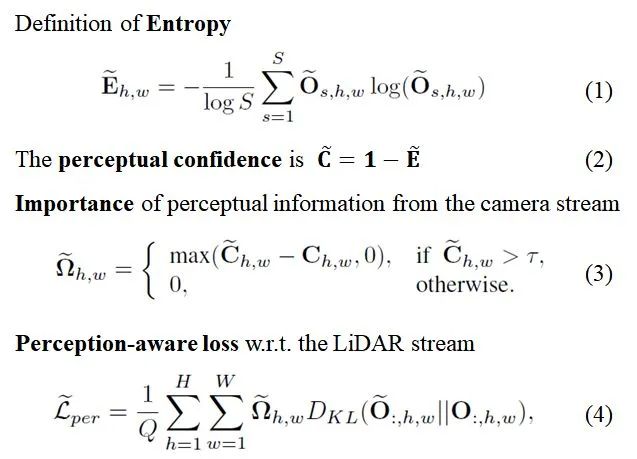
3.4. 模块三:Perception-aware loss
4. Experiments
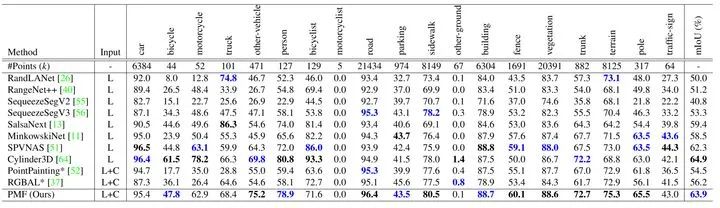
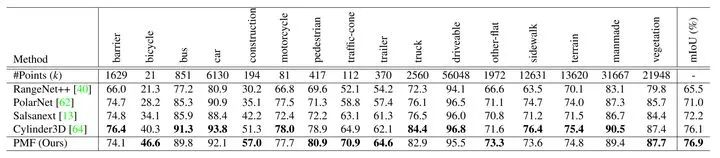
4.1. Results on SemanticKITTI
4.2. Results on nuScenes
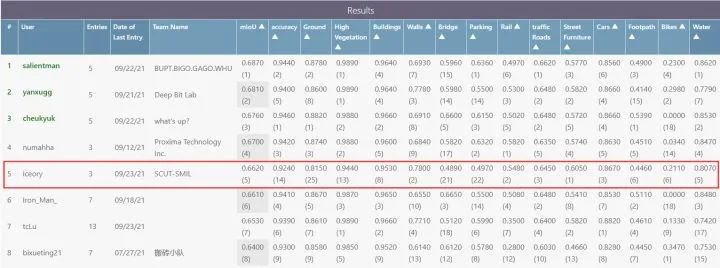
4.3. Results on SensatUrban
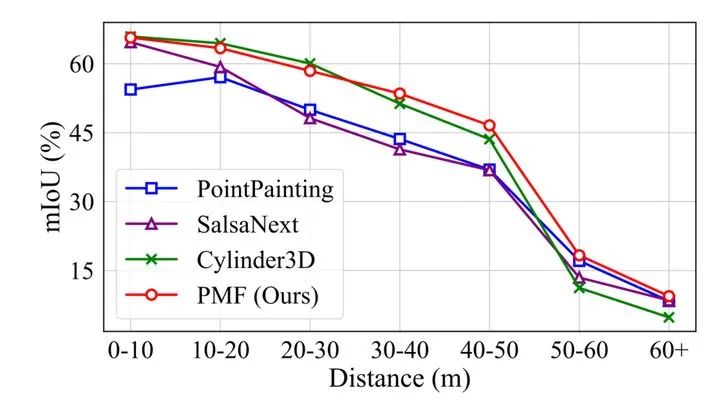
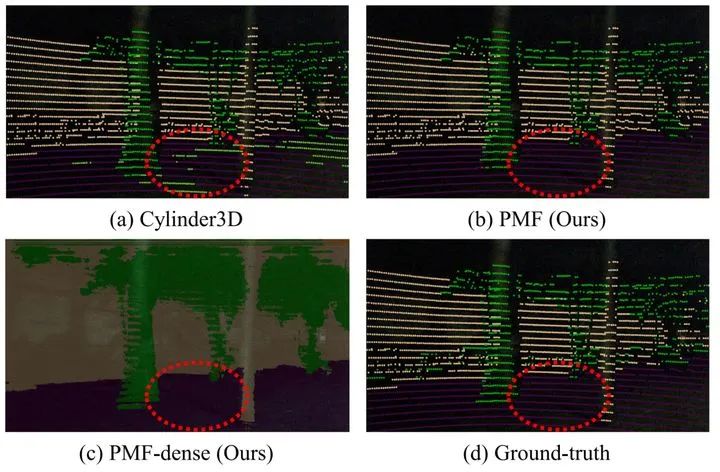
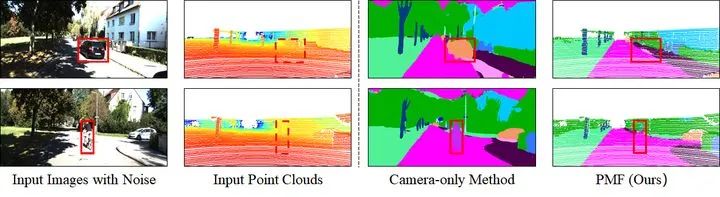
4.4. Adversarial Analysis

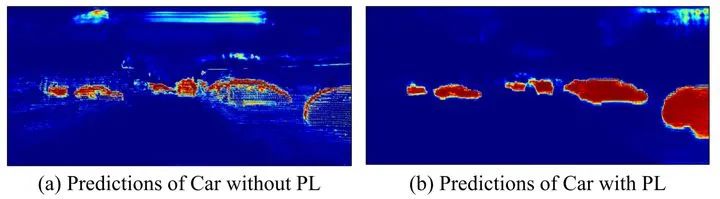
4.5. Effect of perception-aware loss
5. Conclusion
参考文献
本文仅做学术分享,如有侵权,请联系删文。