小白学视觉
小白学视觉




点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

今天我们的目标是找出我们相对于球场上的位置,从而了解我们在比赛中的全局位置。
01.什么是单应性
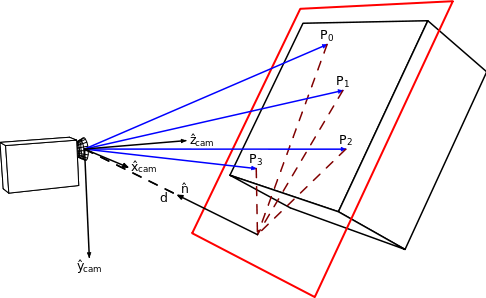
单应性是一种平面关系,可将点从一个平面转换为另一个平面。它是一个3乘3的矩阵,转换3维矢量表示平面上的2D点。这些向量称为同质坐标,下面将进行讨论。下图说明了这种关系。这四个点在红色平面和图像平面之间相对应。单应性存储相机的位置和方向,这可以通过分解单应性矩阵来检索。
针孔相机
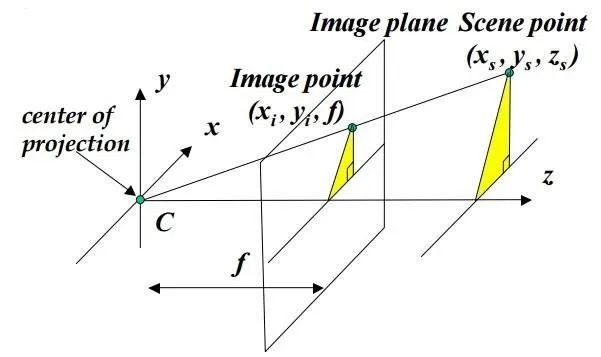
针孔相机数学模型
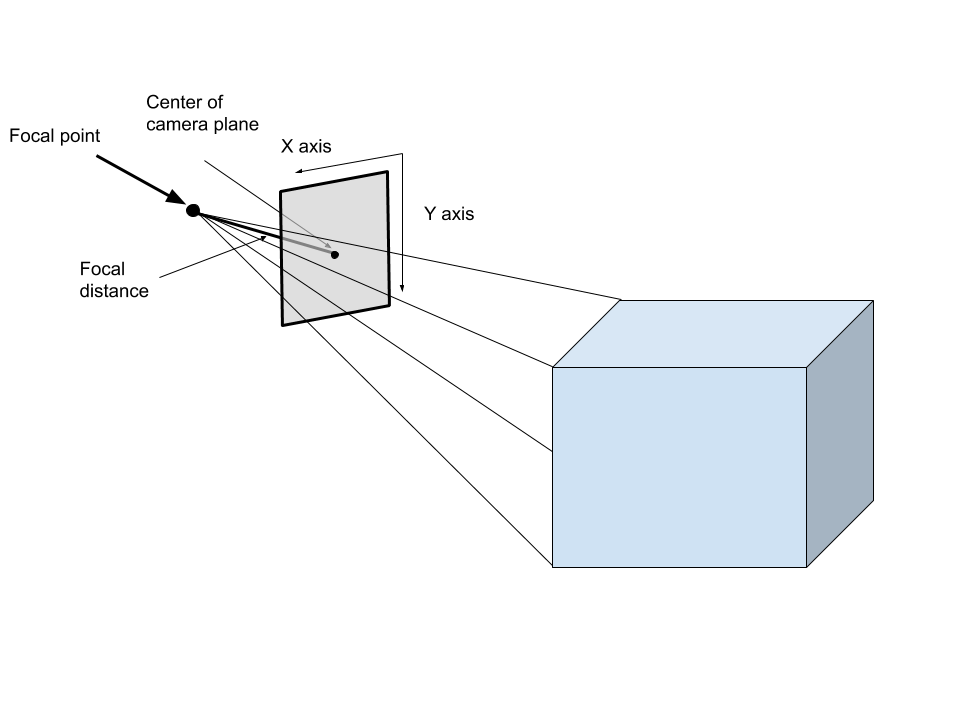
针孔相机模型是相机的数学表示。它接受3D点并将其投影到像上图所示的图像平面上。该模型的重要方面是焦点,像平面(上图中的灰度平面),主点(上图中的像面上的粗体点),焦距(像平面与像之间的距离)焦点)和光轴(垂直于穿过焦点的像平面的线)。可以在投影矩阵中编码该变换,该投影矩阵将表示3D点的4维均匀向量转换为表示图像平面上2d点的3维均匀向量。
齐次坐标是表示计算机视觉中的点的投影坐标。由于拍摄照片时会从3D转换为2D,因此深度范围会丢失。因此,可以将无限数量的3D点投影到相同的2D点,这使得同质坐标在描述可能性射线时非常通用,因为它们的比例相似。齐次坐标仅取直角坐标,并将维数增大到末端。

用齐次坐标表示的笛卡尔坐标,在比例上也相等。
请注意,三角形可能会越来越远且更大,但仍然可以产生相同的图像给定同质坐标,将所有元素除以矢量的最后一个元素(比例因子),然后笛卡尔坐标是一个矢量,该矢量由除最后一个元素之外的所有元素组成。
02.投影矩阵
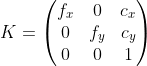
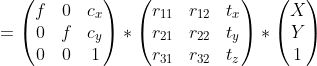
投影矩阵是与相机属性相关的其他两个矩阵的乘积。它们是外部和内部相机矩阵。这些矩阵分别存储摄像机的外部参数和固有参数(因此命名)。
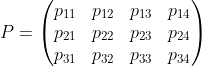
投影矩阵(3 x 4矩阵)
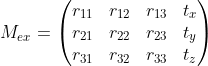
外参矩阵
外在矩阵存储摄像机在全局空间中的位置。该信息存储在旋转矩阵以及平移矢量中。旋转矩阵存储相机的3D方向,而平移矢量将其位置存储在3D空间中。
旋转矩阵
然后将旋转矩阵和平移向量连接起来以创建外部矩阵。从功能上讲,外部矩阵将3D同类坐标从全局坐标系转换为相机坐标系。因此,所有变换后的矢量将相对于焦点在空间中表示相同的位置。
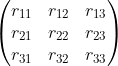
内参矩阵
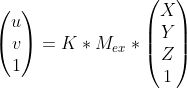
本征矩阵存储相机的本征,例如焦距和主点。焦距(f 1和f 6)是从焦点到像面的距离,可以用像素宽度或像素高度(因此为何有2个焦距)来度量。每个像素都不是一个完美的正方形,因此每个边都有不同的边长。主点(cₓ和cᵧ)是光轴和像平面(像平面的功能中心)的交点。该矩阵将相对于焦点的3D坐标转换到图像平面上;将其视为拍摄照片的矩阵。当与外部矩阵组合时,将创建针孔相机模型。
针孔相机数学模型
现在,单应性是针孔相机模型的特殊情况,其中投影到相机上的所有现实世界坐标都位于z坐标为0的平面上。
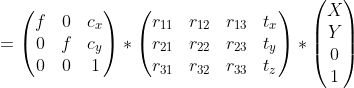
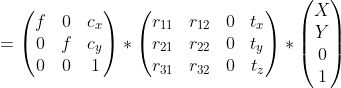
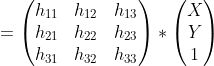
H是单应性矩阵,是3 x 3矩阵,可将点从一个平面转换为另一个平面。在这里,变换是在Z = 0的平面和指向该点的图像平面之间进行的投影。单应性矩阵通常通过4点算法求解。本质上,它使用来自2个平面的4个点对应来求解单应矩阵。在OpenCV中,我们可以使用cv2.findHomography方法找到单应矩阵:
cv2.findHomography(<points from plane 1>, <points from plane 2>)
此方法需要某种形式的特征点跟踪,以便上面方法的结果。坐标测量的质量将有助于上述方法的准确性。一旦有了单应性矩阵,就可以将其分解为摄像机的平移和旋转。单应矩阵的分解如下所示:
我们可以通过将解决方案矩阵的前两列用作旋转矩阵中的前两列,然后使用叉积来找到旋转矩阵的最后一列,从而得出旋转矩阵。翻译是解决方案矩阵的最后一列。
03.分解代码
'''H is the homography matrixK is the camera calibration matrixT is translationR is rotation'''H = H.Th1 = H[0]h2 = H[1]h3 = H[2]K_inv = np.linalg.inv(K)L = 1 / np.linalg.norm(np.dot(K_inv, h1))r1 = L * np.dot(K_inv, h1)r2 = L * np.dot(K_inv, h2)r3 = np.cross(r1, r2)T = L * (K_inv @ h3.reshape(3, 1))R = np.array([[r1], [r2], [r3]])R = np.reshape(R, (3, 3))
代码链接:https://github.com/RaubCamaioni/OpenCV_Position
04,优势
使用Homography比其他算法简单得多,因为它非常简单直观。利用基本或基本矩阵的其他方法需要复杂的算法和更多的实现精力。由于所有视觉本地化方法都在做相同的事情,因此最好在可能的情况下使用Homography,以节省时间和精力。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~