 3D视觉工坊
3D视觉工坊




萧箫 发自 凹非寺
转载自:量子位(QbitAI)
先来看两张图表:
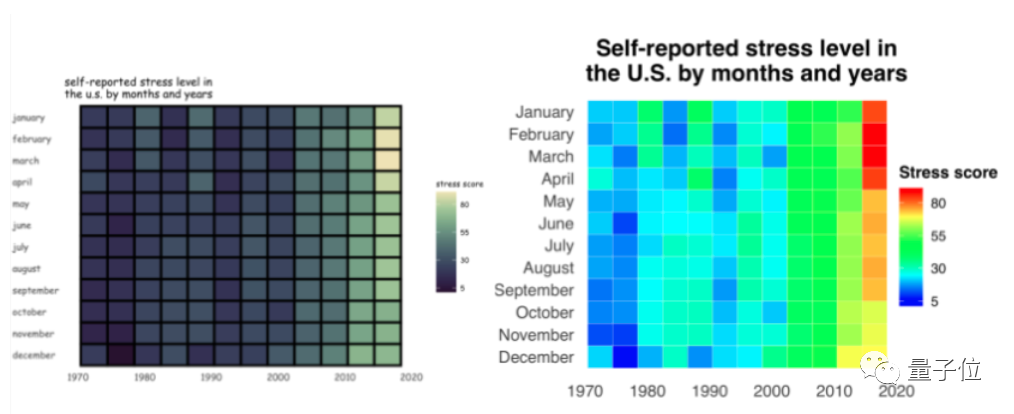
你感觉,哪张图表看起来可信度更高?
其实,这两张图表展现的数据完全一样,但第二张“更漂亮”的图表看起来却更具说服力。
这种现象已经有了科学依据。
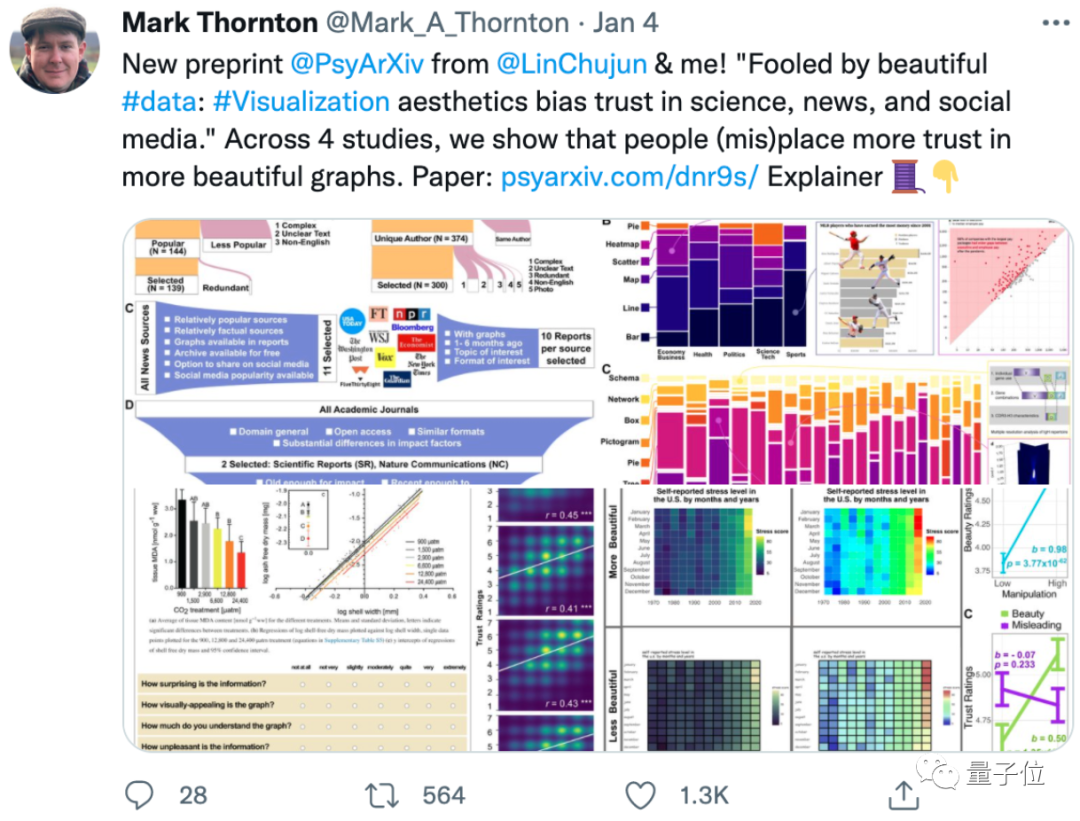
一项最新研究表明,漂亮图表确实更容易受到信任,也更具有误导性,与它们所属的学科类别或来源无关:
而且,学历越高的人群,越容易受这种偏见的影响。
研究po出后,立刻在外网火了一把。
网友们给自己做的丑图找到了新借口:这样才不会让读者产生偏见(得意)。

来看看这是一项怎样的研究。
第一,好看的图更受信任
结论一,与学科类别或来源无关,漂亮的图表就是让人感觉更可信。
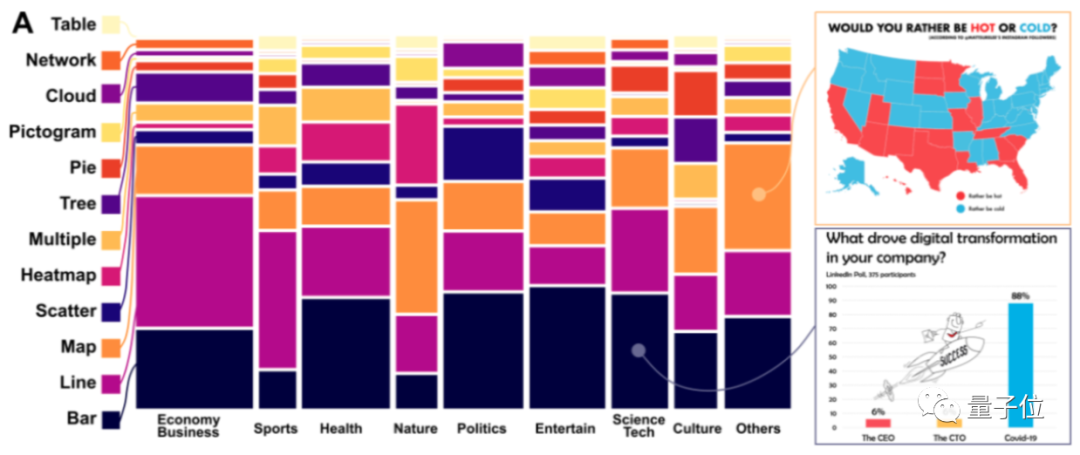
研究人员从社交媒体、新闻和科学论文中,分别筛选了数百张图表。
其中,“社交媒体”指Reddit社区,“新闻”来源于彭博社、金融时报等报刊杂志,“科学论文”则基本来自于Nature Communication和Scientific Reports。
图表所属学科也非常多样,涉及地理、生物、健康、科学、运动等:
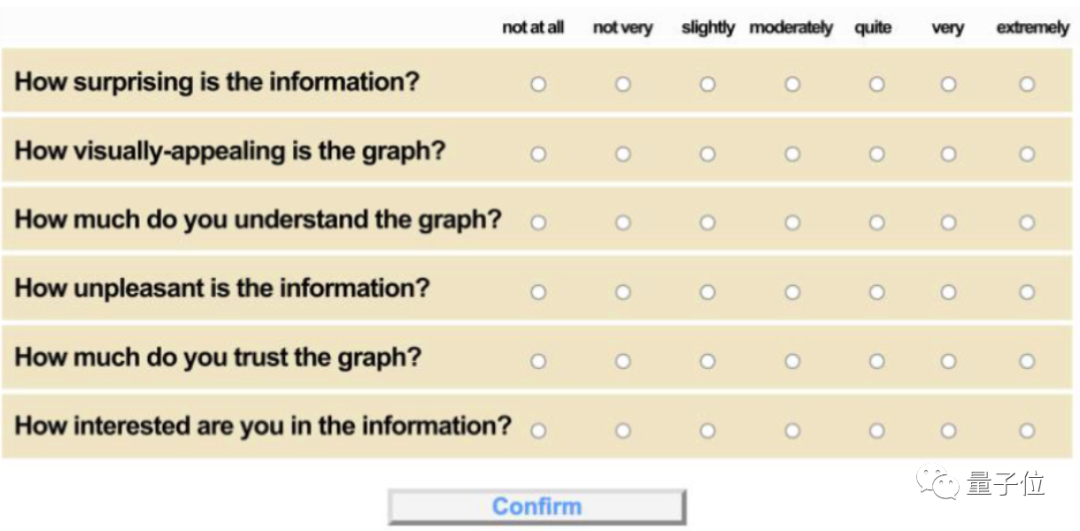
然后,研究人员找了数百名志愿者,给随机出现的图表进行打分:
△出现的一些图表类型
志愿者们会从美观性(色彩搭配、行间距和字体)、易读性(可视化数据类型、图形类型和图形设计)、可信度、感兴趣程度、超出认知程度等角度,评估图表:
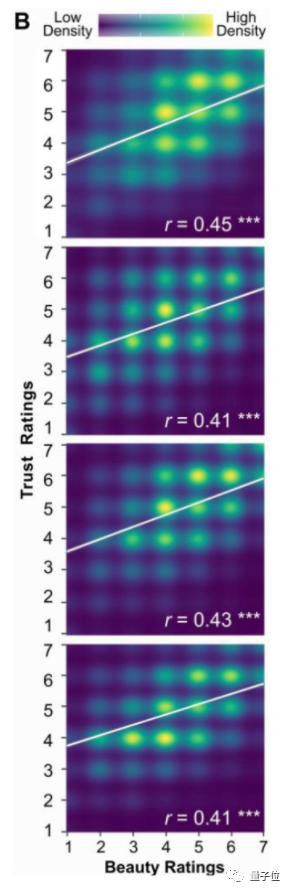
统计结果显示,好看易懂的图表可信度普遍更高(其中横轴是美观性,纵轴是可信度):
既然如此,漂亮的图片会更具有误导性吗?
第二,漂亮的图更具误导性
结论二,图表的“美观性”更影响人们的信任程度,甚至忽略误导性操作带来的影响。
误导性操作指在不影响结论的情况下,利用图标大小等视觉差,故意给读者造成错觉,引导得出与数据不符的结论:
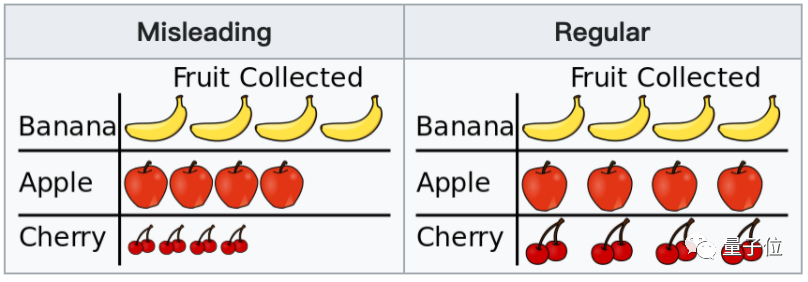
△图源:维基百科
研究人员亲自上手,对一系列图表进行PS,包括将图片改得更漂亮,例如提升分辨率、调整字体大小等;此外,也将图片改得更具误导性,包括采用暗示性色彩来上色等。
具体来说,他们把每个图表都PS成4种类型:
左上角是漂亮+低误导性;左下角是不漂亮+低误导性;右上角是漂亮+高误导性;右下角是不漂亮+高误导性。
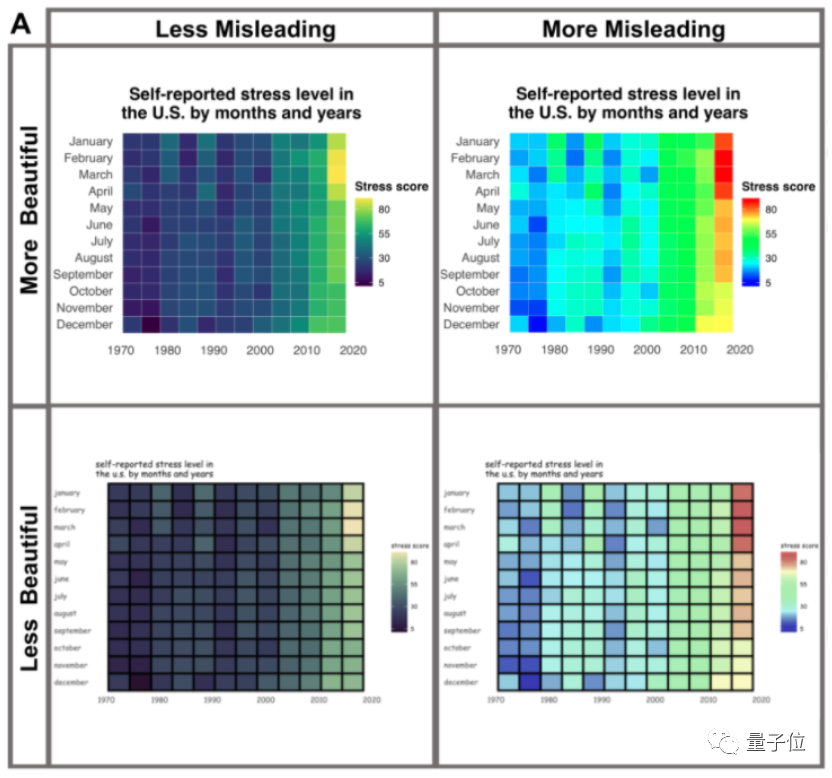
△鲜艳的红色对结论具有误导性
然后,将这些PS后的图片拿给志愿者们进行评估。
结果表明,人们更信任更漂亮的图片,平均比原图的“可信度”高出1分左右(满分7分);但对于色彩不均匀等误导性操作,人们却表现得不敏感,可信度无明显变化。
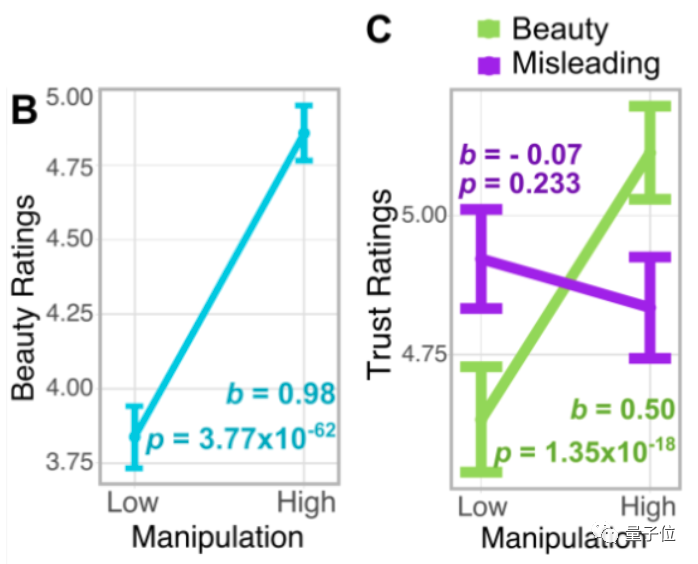
这意味着,志愿者们普遍认为更漂亮的图片看起来更可信,即使它被进行了误导性操作。
除此之外,研究人员分析了一下志愿者们的学历,还发现了一个意外现象:
学历越高的志愿者,评估可信度时越容易受到好看图表的影响。

作者Mark Thornton认为,在引用或评审科学论文时,确实可能受到这种好看图表“偏见”的影响,导致对应论文的引用率和通过率更高:
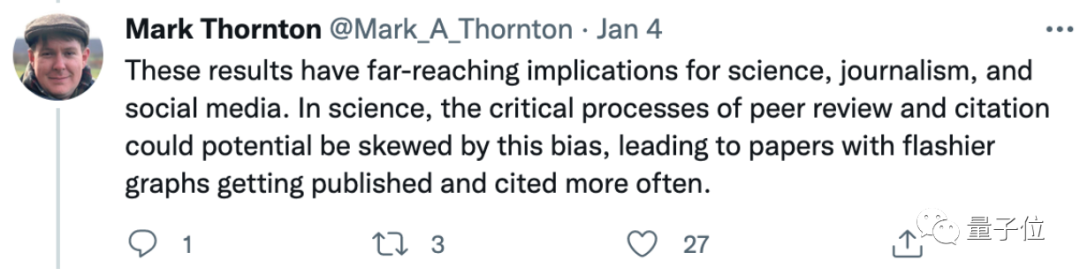
所以下次投稿之前,试试把论文图表搞得更漂亮一点?(手动狗头)
作者介绍
论文一作Chujun Lin,本科毕业于浙江大学,在加州理工学院取得社会科学博士学位后,又进行了一年博士后工作,目前在达特茅斯学院继续进行博士后工作,研究方向主要与计算方法(建模、深度学习等)、社会心理学理论和社会性指标相关。

二作Mark Thornton,达特茅斯学院助理教授,本科毕业于普林斯顿大学,并于哈佛大学取得硕博学位,研究方向主要是心理学和脑科学。
论文地址:
https://psyarxiv.com/dnr9s/
参考链接:
[1]https://weibo.com/1402400261/L9jYsokzC
[2]https://www.chujunlin.com/
[3]https://twitter.com/Mark_A_Thornton/status/1478057342088495112
[4]https://pbs.dartmouth.edu/people/mark-thornton
3D视觉精品课程推荐:
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款 
圈里有高质量教程资料、答疑解惑、助你高效解决问题 觉得有用,麻烦给个赞和在看~

