 AI人工智能初学者
AI人工智能初学者




1cuda学习笔记1——向量矩阵相加
GPU并不是一个独立运行的计算平台,而需要与CPU协同工作,也可以把GPU看成是CPU的协处理器,因此当在说GPU并行计算时,其实是指的基于CPU+GPU的异构计算架构。在异构计算架构中,GPU与CPU通过PCIe总线连接在一起进行协同工作,CPU所在位置称为为主机端(host),而GPU所在位置称为设备端(device),如下图所示。

可以看到GPU包括更多的运算核心,其特别适合数据并行的计算密集型任务,如大型矩阵运算,而CPU的运算核心较少,但是其可以实现复杂的逻辑运算,因此其适合控制密集型任务。另外,CPU上的线程是重量级的,上下文切换开销大,但是GPU由于存在很多核心,其线程是轻量级的。因此,基于CPU+GPU的异构计算平台可以优势互补,CPU负责处理逻辑复杂的串行程序,而GPU重点处理数据密集型的并行计算程序,从而发挥最大功效。
在给出CUDA的编程实例之前,这里先对CUDA编程模型中的一些概念及基础知识做个简单介绍。CUDA编程模型是一个异构模型,需要CPU和GPU协同工作。在CUDA中,host和device是两个重要的概念,用host指代CPU及其内存,而用device指代GPU及其内存。CUDA程序中既包含host程序,又包含device程序,它们分别在CPU和GPU上运行。同时,host与device之间可以进行通信,这样它们之间可以进行数据拷贝。典型的CUDA程序的执行流程如下:
分配host内存,并进行数据初始化; 分配device内存,并从host将数据拷贝到device上; 调用CUDA的 kernel 函数在device上完成指定的运算; 将device上的运算结果拷贝到host上; 释放device和host上分配的内存。
上面流程中最重要的一个过程是调用CUDA的 kernel 函数来执行并行计算,kernel是CUDA中一个重要的概念,kernel是在device上线程中并行执行的函数, kernel 函数用__global__符号声明,在调用时需要用<<<grid, block>>>来指定kernel要执行的线程数量,在CUDA中,每一个线程都要执行 kernel 函数,并且每个线程会分配一个唯一的线程号thread ID,这个ID值可以通过 kernel 函数的内置变量threadIdx来获得。
由于GPU实际上是异构模型,所以需要区分 host 和 device上 的代码,在CUDA中是通过函数类型限定词开区别 host 和 device 上的函数,主要的3个函数类型限定词如下:
__global__:在device上执行,从host中调用(一些特定的GPU也可以从device上调用),返回类型必须是void,不支持可变参数,不能成为类成员函数。注意用__global__定义的 kernel 是异步的,这意味着 host 不会等待 kernel 执行完就执行下一步。__device__:在device上执行,单仅可以从device中调用,不可以和__global__同时用。__host__:在host上执行,仅可以从host上调用,一般省略不写,不可以和__global__同时用,但可和__device__同时使用,此时函数会在 device 和 host 都编译。
要深刻理解kernel,必须要对 kernel 的线程层次结构有一个清晰的认识。首先GPU上很多并行化的轻量级线程。如下图所示,kernel在device上执行时实际上是启动很多线程:
一个 kernel 所启动的所有线程称为一个 Grid,同一个 Grid 上的线程共享相同的全局内存空间,Grid 是线程结构的第一层次,而 Grid 又可以分为很多 Block,一个Block 里面包含很多Thread,这是第二个层次。
Thread两层组织结构如下图所示,这是一个 Gird 和 Block 均为2-dim的线程组织。Grid 和 Block 都是定义为dim3类型的变量,dim3可以看成是包含3个无符号整数(x,y,z)成员的结构体变量,在定义时,缺省值初始化为1。因此 Gird 和 Block 可以灵活地定义为1-dim,2-dim以及3-dim结构,对于图中结构(主要水平方向为 x 轴),定义的 Gird 和 Block 如下所示,kernel在调用时也必须通过执行配置<<<Grid, Block>>>来指定 kernel 所使用的线程数及结构。
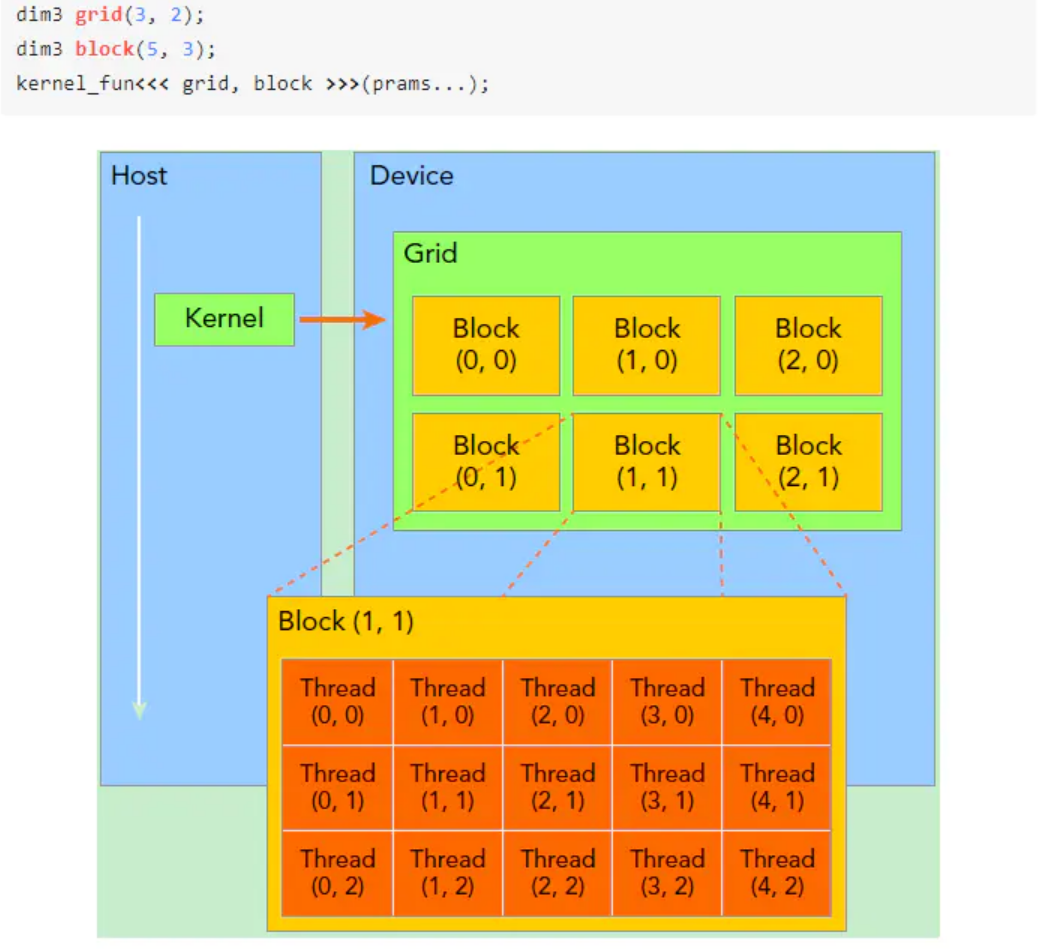
所以,一个线程需要两个内置的坐标变量(blockIdx,threadIdx)唯一标识,它们都是dim3类型变量,其中 blockIdx 指明线程所在 Grid 中的位置,而 threaIdx 指明线程所在 block 中的位置,如图中的 Thread (1,1) 满足:
threadIdx.x = 1
threadIdx.y = 1
blockIdx.x = 1
blockIdx.y = 1
一个线程块上的线程是放在同一个流式多处理器(SM)上的,但是单个SM的资源有限,这导致线程块中的线程数是有限制的,现代GPUs的线程块可支持的线程数可达1024个。有时候,我们要知道一个线程在blcok中的全局ID,此时就必须还要知道block的组织结构,这是通过线程的内置变量blockDim来获得。它获取线程块各个维度的大小。对于一个2-dim的block ,线程 的ID值为 ,如果是 3-dim 的block ,线程 的ID值为 。另外线程还有内置变量 gridDim,用于获得网格块各个维度的大小。
kernel 的这种线程组织结构天然适合vector,matrix等运算,如利用上图 2-dim 结构实现两个矩阵的加法,每个线程负责处理每个位置的两个元素相加,代码如下所示。线程块大小为(16, 16),然后将NxN大小的矩阵均分为不同的线程块来执行加法运算。
// Kernel定义
__global__ void MatAdd(float A[N][N], float B[N][N], float C[N][N])
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int j = blockIdx.y * blockDim.y + threadIdx.y;
if (i < N && j < N)
C[i][j] = A[i][j] + B[i][j];
}
int main()
{
...
// Kernel 线程配置
dim3 threadsPerBlock(16, 16);
dim3 numBlocks(N / threadsPerBlock.x, N / threadsPerBlock.y);
// kernel调用
MatAdd<<<numBlocks, threadsPerBlock>>>(A, B, C);
...
}
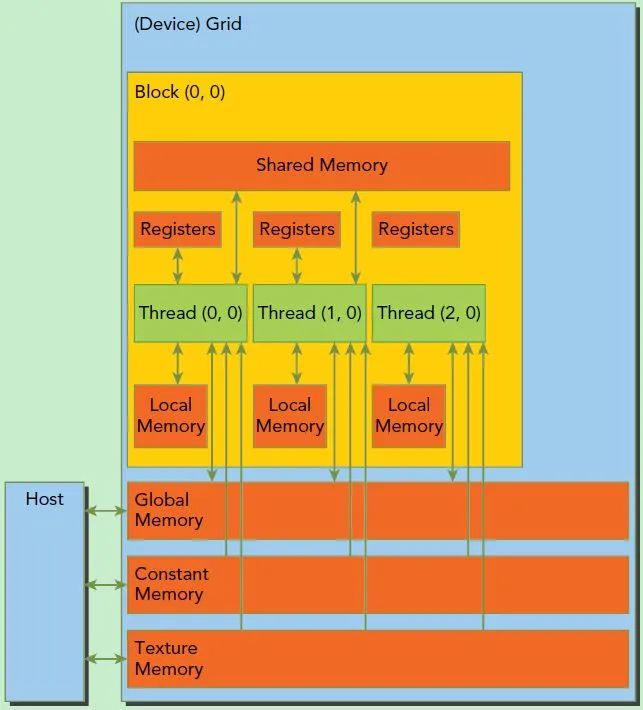
此外这里简单介绍一下CUDA的内存模型,如下图所示。可以看到,每个线程有自己的私有本地内存(Local Memory),而每个线程块有包含共享内存(Shared Memory),可以被线程块中所有线程共享,其生命周期与线程块一致。此外,所有的线程都可以访问全局内存(Global Memory)。还可以访问一些只读内存块:常量内存(Constant Memory)和纹理内存(Texture Memory)。
还有重要一点,你需要对GPU的硬件实现有一个基本的认识。上面说到了kernel的线程组织层次,那么一个kernel实际上会启动很多线程,这些线程是逻辑上并行的,但是在物理层却并不一定。这其实和CPU的多线程有类似之处,多线程如果没有多核支持,在物理层也是无法实现并行的。但是好在GPU存在很多CUDA核心,充分利用CUDA核心可以充分发挥GPU的并行计算能力。
GPU硬件的一个核心组件是SM,前面已经说过,SM是英文名是 Streaming Multiprocessor,翻译过来就是流式多处理器。SM的核心组件包括CUDA核心,共享内存,寄存器等,SM可以并发地执行数百个线程,并发能力就取决于SM所拥有的资源数。当一个kernel被执行时,它的 Gird 中的线程块被分配到SM上,一个线程块只能在一个SM上被调度。SM一般可以调度多个线程块,这要看SM本身的能力。那么有可能一个 kernel 的各个线程块被分配多个SM,所以 Gird 只是逻辑层,而SM才是执行的物理层。
SM采用的是SIMT架构,基本的执行单元是线程束(warps),线程束包含32个线程,这些线程同时执行相同的指令,但是每个线程都包含自己的指令地址计数器和寄存器状态,也有自己独立的执行路径。所以尽管线程束中的线程同时从同一程序地址执行,但是可能具有不同的行为,比如遇到了分支结构,一些线程可能进入这个分支,但是另外一些有可能不执行,它们只能死等,因为GPU规定线程束中所有线程在同一周期执行相同的指令,线程束分化会导致性能下降。当线程块被划分到某个SM上时,它将进一步划分为多个线程束,因为这才是SM的基本执行单元,但是一个SM同时并发的线程束数是有限的。这是因为资源限制,SM要为每个线程块分配共享内存,而也要为每个线程束中的线程分配独立的寄存器。所以SM的配置会影响其所支持的线程块和线程束并发数量。
总之,就是 Gird 和 Block 只是逻辑划分,一个 kernel 的所有线程其实在物理层是不一定同时并发的。所以kernel的 Gird 和 Block 的配置不同,性能会出现差异,这点是要特别注意的。还有,由于SM的基本执行单元是包含32个线程的线程束,所以 Block 大小一般要设置为32的倍数。

所有CUDA kernel的启动都是异步的,当CUDA kernel被调用时,控制权会立即返回给CPU。在分配Grid、Block大小时,可以遵循这几点原则:
1、保证 Block 中 Thread 数目是32的倍数。这是因为同一个 Block 必须在一个SM内,而SM的 Warp 调度是32个线程一组进行的;
2、避免 Block 太小:每个 Blcok 最少 128 或 256 个thread;
3、根据 kernel 需要的资源调整 Block,多做实验来挖掘最佳配置;
4、保证 Block 的数目远大于 SM 的数目。
在进行CUDA编程前,可以先检查一下自己的GPU的硬件配置,这样才可以有的放矢,可以通过下面的程序获得GPU的配置属性:
struct cudaDeviceProp {
char name[256]; // 识别设备的ASCII字符串(比如,"GeForce GTX 1050")
size_t totalGlobalMem; // 全局内存大小
size_t sharedMemPerBlock; // 每个block内共享内存的大小
int regsPerBlock; // 每个block 32位寄存器的个数
int warpSize; // warp大小
size_t memPitch; // 内存中允许的最大间距字节数
int maxThreadsPerBlock; // 每个Block中最大的线程数是多少
int maxThreadsDim[3]; // 一个块中每个维度的最大线程数
int maxGridSize[3]; // 一个网格的每个维度的块数量
size_t totalConstMem; // 可用恒定内存量
int major; // 该设备计算能力的主要修订版号
int minor; // 设备计算能力的小修订版本号
int clockRate; // 时钟速率
size_t textureAlignment; // 该设备对纹理对齐的要求
int deviceOverlap; // 一个布尔值,表示该装置是否能够同时进行cudamemcpy()和内核执行
int multiProcessorCount; // 设备上的处理器的数量
int kernelExecTimeoutEnabled; // 一个布尔值,该值表示在该设备上执行的内核是否有运行时的限制
int integrated; // 返回一个布尔值,表示设备是否是一个集成的GPU(即部分的芯片组、没有独立显卡等)
int canMapHostMemory; // 表示设备是否可以映射到CUDA设备主机内存地址空间的布尔值
int computeMode; // 一个值,该值表示该设备的计算模式:默认值,专有的,或禁止的
int maxTexture1D; // 一维纹理内存最大值
int maxTexture2D[2]; // 二维纹理内存最大值
int maxTexture3D[3]; // 三维纹理内存最大值
int maxTexture2DArray[3]; // 二维纹理阵列支持的最大尺寸
int concurrentKernels; // 一个布尔值,该值表示该设备是否支持在同一上下文中同时执行多个内核
}
向量加法以及矩阵加法的 cuda 实现
#include <stdio.h>
#include <time.h>
// HandleError: 主要用于检查对应的 CUDA 函数是否运行成功,其他地方可复用
// 初始化一个 cudaError_t 类型变量 err
static void HandleError(cudaError_t err, const char *file, int line){
// cudaSuccess=0:API调用返回没有错误;对于查询调用,这还意味着要查询的操作已完成。
if(err != cudaSuccess){
// cudaGetErrorString(err) :返回的是 err 变量对应的错误信息,以字符串的形式接收。
printf("%s in %s at line %d\n", cudaGetErrorString(err), file, line);
exit(EXIT_FAILURE);
}
}
#define HANDLE_ERROR(err)(HandleError(err, __FILE__, __LINE__))
int getThreadNum(){
// cudaDeviceProp数据类型针对函式 cudaGetDeviceProperties定义的,cudaGetDeviceProperties函数的功能是取得支持GPU计算的装置的相关属性;
// 如支持CUDA版本号装置的名称、内存的大小、最大的 thread 数目、执行单元的频率等。
cudaDeviceProp prop; //定义prop数据结构
int count;
//可以通过 cudaGetDeviceCount 函数获取 CUDA 的设备数
HANDLE_ERROR(cudaGetDeviceCount(&count));
printf("gpu num %d\n", count);
HANDLE_ERROR(cudaGetDeviceProperties(&prop, 0));
// prop.maxThreadsPerBlock:每个Block中最大的线程数
printf("max thread num: %d\n", prop.maxThreadsPerBlock);
// prop.maxGridSize[0]: 一个网格的 0 维度的块数量
// prop.maxGridSize[1]: 一个网格的 1 维度的块数量
// prop.maxGridSize[2]: 一个网格的 2 维度的块数量
printf("max grid dimensions: %d, %d, %d)\n", prop.maxGridSize[0], prop.maxGridSize[1], prop.maxGridSize[2]);
return prop.maxThreadsPerBlock;
}
// CUDA 核函数:向量相加
__global__ void vevtorAdd(int* a, int* b, int* c, int num){
// threadIdx.x 一样是 CUDA 内建的变量,它表示的是目前的 thread 编号
int i = threadIdx.x;
if(i < num){
c[i] = a[i] + b[i];
}
}
// CUDA 核函数:矩阵相加
__global__ void MatAdd(int* A, int* B, int* C, int num)
{
int i = blockIdx.x * blockDim.x + threadIdx.x;
int j = blockIdx.y * blockDim.y + threadIdx.y;
if (i < num && j < num)
C[i][j] = A[i][j] + B[i][j];
}
int main(void){
// init data
int num = 10;
int a[num], b[num], c[num];
int *a_gpu, *b_gpu, *c_gpu;
// 初始化向量
for(int i = 0; i < num; i++){
a[i] = i;
b[i] = i * i;
}
int mA[num][num], mB[num][num], mC[num][num];
int *A_GPU, *B_GPU, *C_GPU;
//初始化矩阵
for(int i = 0;i < num;i++){
for(int j = 0;j < num;j++){
mA[i][j] = 1;
mB[i][j] = 2;
}
}
printf("Matrix A\n");
for(int i = 0;i < num;i++){
for(int j = 0;j < num;j++){
printf("%d ",mA[i][j]);
}
printf("\n");
}
printf("\n");
printf("Matrix B:\n");
for(int i = 0;i < num;i++){
for(int j = 0;j < num;j++){
printf("%d ", mB[i][j]);
}
printf("\n");
}
printf("\n");
// 其实直接用 &a_gpu 也是可以的,但是函数原型必须得是 (void **) 型的指针
// cudaMalloc的第 1 个参数传递的是存储在 cpu 内存中的指针变量的地址,第 2 个参数传递的是欲申请内存的大小
// cudaMalloc在执行完成后,向这个地址中写入了一个地址值(此地址值是GPU显存里的)。
HANDLE_ERROR(cudaMalloc((void **)&a_gpu, num * sizeof(int)));
HANDLE_ERROR(cudaMalloc((void **)&b_gpu, num * sizeof(int)));
HANDLE_ERROR(cudaMalloc((void **)&c_gpu, num * sizeof(int)));
HANDLE_ERROR(cudaMalloc((void **)&A_GPU, num * sizeof(int)));
HANDLE_ERROR(cudaMalloc((void **)&B_GPU, num * sizeof(int)));
HANDLE_ERROR(cudaMalloc((void **)&C_GPU, num * sizeof(int)));
// copy data
// cudaMemcpy用于在主机(Host)和设备(Device)之间往返的传递数据,用法如下:
// 主机到设备:cudaMemcpy(d_A, h_A, nBytes, cudaMemcpyHostToDevice);
// 设备到主机:cudaMemcpy(h_A, d_A, nBytes, cudaMemcpyDeviceToHost);
// 注意:该函数是同步执行函数,在未完成数据的转移操作之前会锁死并一直占有 CPU 进程的控制权,所以不用再添加 cudaDeviceSynchronize() 函数
HANDLE_ERROR(cudaMemcpy(a_gpu, a, num * sizeof(int), cudaMemcpyHostToDevice)); // 主机到设备
HANDLE_ERROR(cudaMemcpy(b_gpu, b, num * sizeof(int), cudaMemcpyHostToDevice)); // 主机到设备
HANDLE_ERROR(cudaMemcpy(A_GPU, mA, num * sizeof(int), cudaMemcpyHostToDevice)); // 主机到设备
HANDLE_ERROR(cudaMemcpy(B_GPU, mB, num * sizeof(int), cudaMemcpyHostToDevice)); // 主机到设备
int threadNum = getThreadNum(); // 设置核函数的 thread 数
int blockNum = 1; // 设置核函数的 block 数量
// do add with cuda
vevtorAdd<<<blockNum, threadNum>>>(a_gpu, b_gpu, c_gpu, num);
dim3 gridSize(5, 5);
dim3 blockSize(2, 2);
MatAdd<<<gridSize, blockSize>>>(A_GPU, B_GPU, C_GPU, num);
// get data
HANDLE_ERROR(cudaMemcpy(mC, C_GPU, num * sizeof(int), cudaMemcpyDeviceToHost)); // 设备到主机
// visualization
printf("Matrix Add Result:\n");
for(int i = 0; i < num; i++)
{
for(int j = 0; j < num; j++)
{
printf("%d ", mC[i][j]);
}
printf("\n");
}
printf("\n");
printf("Vector Add Result:\n");
for(int i = 0; i < num; i++){
printf("%d + %d = %d\n", a[i], b[i], c[i]);
}
return 0;
}
完整代码见【集智书童】知识星球
星球主要内容包括:经典论文分享、可落地方法复现、模型部署、Transformer部署与改进、电子资源分享等内容。
以下是星球的部分内容,持续更新中......




扫描下方二维码,我们一起学习吧!!!

长按扫描下方二维码添加小助手。
可以一起讨论遇到的问题

声明:转载请说明出处
扫描下方二维码关注【集智书童】公众号,获取更多实践项目源码和论文解读,非常期待你我的相遇,让我们以梦为马,砥砺前行!



