 目标检测与深度学习
目标检测与深度学习




点击左上方蓝字关注我们



摘要
CondLaneNet首先检测车道实例,然后动态预测每个实例的线形状。针对车道实例级识别问题,提出了一种基于条件卷积和逐行公式的条件车道检测策略。此外,作者设计了循环实例模块(RIM),以克服复杂拓扑的车道线检测问题,如密集线和分叉线。由于端到端管道的后处理较少,该方法具有较高的实时性。作者在车道检测的三个基准上对作者的方法进行了广泛的评价。结果表明,该方法在三个基准数据集上都取得了最先进的性能。此外,作者的方法具有准确性和效率并存,例如在CULane上的F1分数为78.14,FPS为220

这项工作的贡献总结如下:
通过所提出的条件车道检测策略和逐行规划,大大提高了车道实例级的识别能力。
作者解决了复杂拓扑结构的车道线检测问题,如密集线和分叉线。
作者的CondLaneNet框架在多个数据集上取得了最先进的性能,例如,在CurveLanes上的F1得分为86.10(比SOTA高4.6%),在CULane上的F1得分为79.48(比SOTA高3.2%)。此外,作者的小版本的CondLaneNet在保证高精度的同时具有很高的效率,例如在CULane上的78.14 F1分数和220 FPS。

框架结构
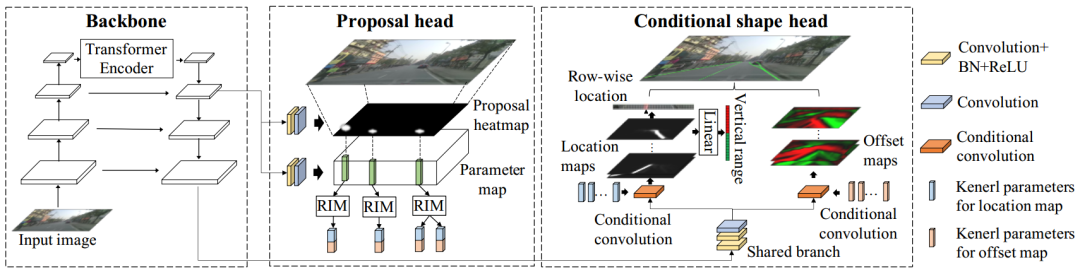
作者的CondLaneNet框架的结构。骨干网采用标准ResNet[8]和FPN[23]进行多尺度特征提取。为了更有效地提取上下文特征,增加了变压器编码器模块[37]。提案头负责检测位于线路起点的提案点。同时,对包含动态卷积核的参数映射进行了预测。条件形状头预测行方向位置、垂直范围和偏移映射,以描述每一行的形状。为了解决密集线和叉线的情况,RIM被设计。
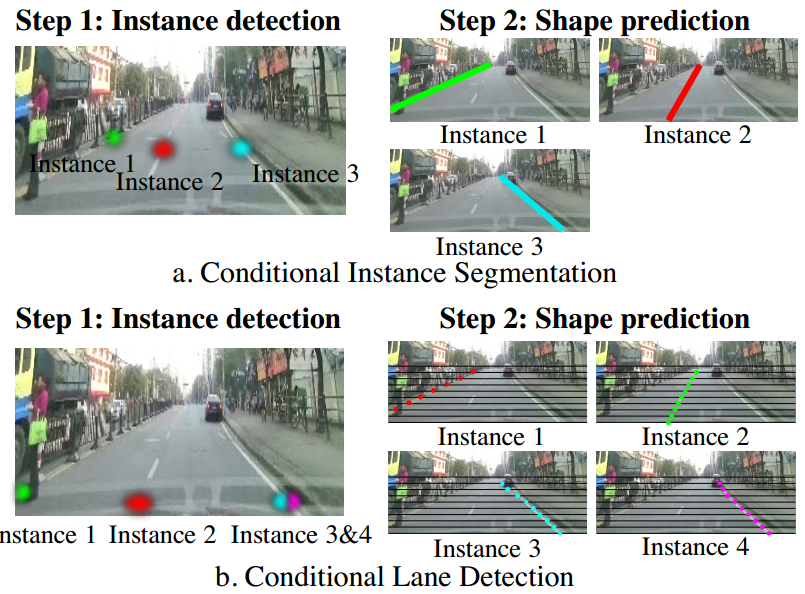
条件实例分割与提出的条件车道检测策略的区别。作者的CondLaneNet检测车道线的起点来检测实例,并使用逐行公式来描述线的形状,而不是掩码。基于提出的RIM可以区分重叠的线

实验结果
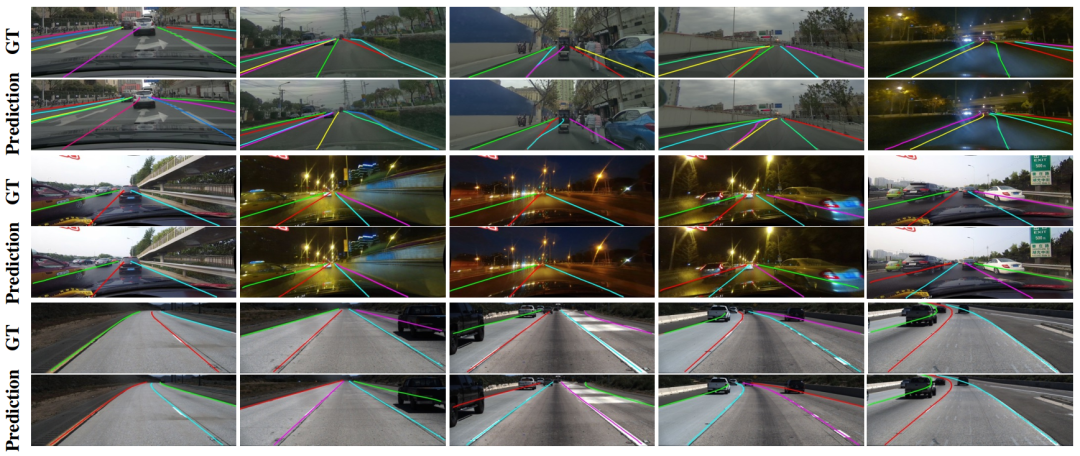
CurveLanes(第一行),CULane(中间一行)和TuSimple(最后一行)数据集的可视化结果。不同的车道实例用不同的颜色表示。
 结论
结论
在这项工作中,作者提出了CondLaneNet,一个新的自顶向下的车道检测框架,首先检测车道实例,然后实例明智地预测形状。针对实例级识别问题,提出了基于条件卷积和逐行公式的条件车道检测策略。此外,作者设计了RIM以应对复杂的车道线拓扑,如密集线和分叉线。作者的CondLaneNet框架刷新了CULane、CurveLanes和tussimple的最先进的性能。此外,在CULane和CurveLanes上,作者的小型CondLaneNet不仅在精度上超过了其他方法,而且呈现出实时效率。
论文链接:https://arxiv.org/pdf/2105.05003.pdf
END
 整理不易,点赞三连↓
整理不易,点赞三连↓

