 极市平台
极市平台




极市导读
华硕和台湾大学提出MBNet获NTIRE 2021 深度引导影像重照明冠军,该方案拿下了最高的SSIM和MPS并使用了track II的资料,让训练集数量翻倍。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
论文链接:https://arxiv.org/abs/2105.00690
NTIRE 比赛报告链接:https://arxiv.org/abs/2104.13365
代码链接:https://github.com/weitingchen83/NTIRE2021-Depth-Guided-Image-Relighting-MBNet
前言
最近在看CVPR2021中New Trends in Image Restoration and Enhancement workshop的比赛,发现其中一个赛道,深度引导影像重照明(Depth Guided Image Relighting)很感兴趣,和典型的去噪,超分不太一样,而且还需考虑深度的空间信息,似乎是非常新的领域,于是看了一下比赛的报告和冠军方案的文章。冠军方案是由华硕和台湾大学联合提出的MBNet,网络设计和数据强化的方法挺有意思,遂纪录一些想法,欢迎交流。
简介
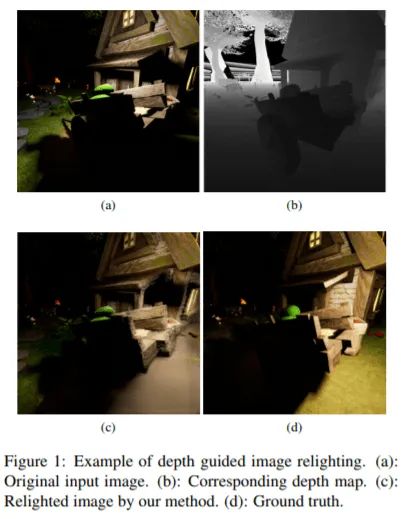
Depth-guided Image Relighting,字面上就是要输出不同光源的图片,不同光源可能指说不同方向光和不同色温。不同方向和不同颜色的光对于同样的场景,就会有不同方向的影子和明亮差异。举个例子,下面图(a)和图(d)分别是输入和输出,其中输入是向北的光,温度为6500K,输出是向东的光,4500K。可以发现到输入图的底边(南方)和输出图的左边因为影子所以偏暗。基于影像的重照明任务去年ECCVW的AIM就有了,而今年多提供了深度信息,图(b),设计的网络同时要处理深度图和影像的特征,变得更有挑战。
比赛规则
比赛使用了合成的数据集VIDIT (Virtual Image Dataset for Illumination Transfer),共有390个场景,分成300个训练集,45个验证集,45个测试集。而对于每一个场景,提供5种色温和8个方向角的光照情况,所以一个场景,有40张不同光线情况的图和深度图。Track I的任务是输入图光线是色温6500K是朝北,输出为4500K是向东的光,而剩下的图片是用在Track II。最后计算模型在测试集的分数,分数看结果图和GT的PSNR, SSIM, LPIPS,最后的指标是由LPIPS和SSIM综合的MPS。
冠军方案
网络架构
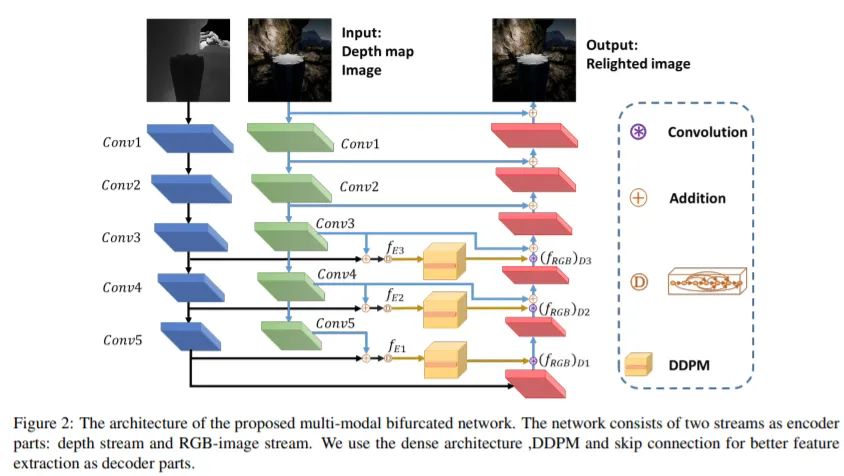
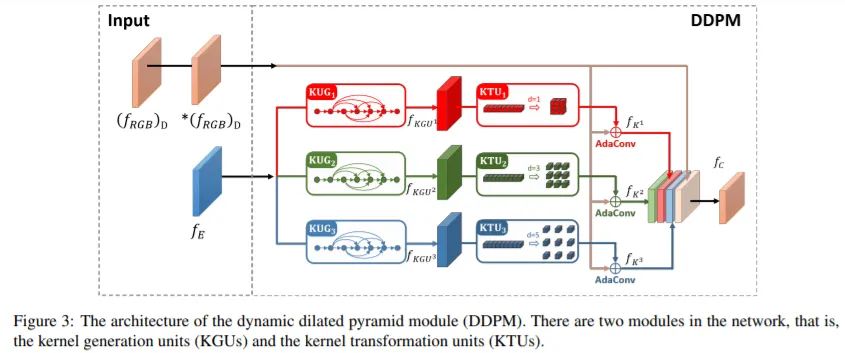
这里分成网络结构和数据强化的部分讲解。网络结构是多模态的叉型网络,为了要有效地融合图像信息和深度图信息,作者借鉴RGB-D SOD的思路设计模型,网络可以看成是典型的encoder-decoder结构,而图片通过网络学习特征后,作者使用残差学习,网络学习的是输出图和输入图的差。先介绍encoder端,在enocoder端,图像和深度图分别经过个别的backbone取不同尺度的特征,这里是选用2个ResNet50实现,而deocder端负责融合不同尺度的图像和深度特征。而在encoder端及decoder则是使用稠密联接(Dense connection)以及扩张动态金字塔模块(Dynamic dilated pyramid module, DDPM)来增加特征的传递能力,DDPM使用了Kernel generation units (KGUs)以及Kernel transformation units (KTUs)来增强特征的有效链接性,每个KGUs会使用融合的特征去产生不同的张量去涵盖不同的邻近感受野(3x3, 7x7, 11x11),而KTUs则会产生规律的卷积模块搭配不同的扩张大小(Dilated rate)。decoder接收了DDPM的特征后,再逐步放大特征图,到最后层输出重照明图。
网络训练的损失函数是采用Charbonnier loss、SSIM loss、perceptual loss三种损失函数,而图片本身就含有方向讯息,所以没有做随机翻转,裁切的操作,输入是一整张的图,要加强网络的鲁棒性,反而是用以下的方法进行数据增强。
数据强化
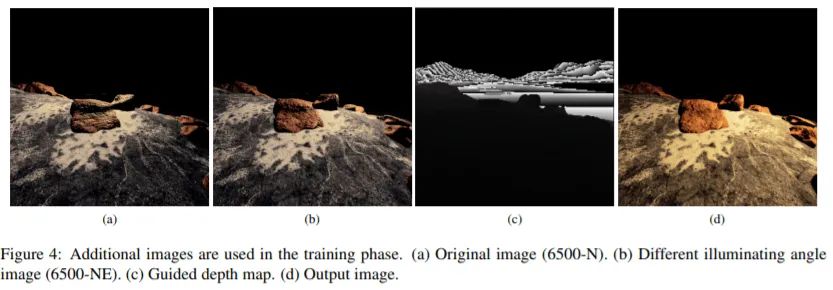
这里是我觉得论文最精明的地方,不只模型设计很重要,数据量也会决定模型的好坏。作者额外使用Track II的图片增加训练集数目,因为输入图的光线情况是色温6500K是向北的光,所以作者在实验阶段也使用色温6500K是向东北的光的图像,而输出图和深度图则维持一样,在下面的例图可以看的出来朝向东北和朝北的图片差别不大,这方法感觉简单粗暴,但硬是把数据量翻倍,在比赛中是很聪明的思路。
实验结果
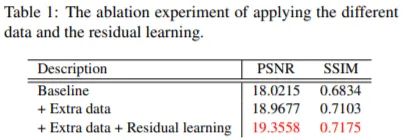
比赛主要计算结果图和GT的PSNR, SSIM,LPIPS,最后的指标是由LPIPS和SSIM综合的MPS。作者先展示了使用额外track II的数据,整体的分数有很大的改变,其实很有道理,毕竟训练集只有少少的300张,模型很容易overfitting,数据翻倍肯定让模型进步。再加上residual learning,分数也又再进步。
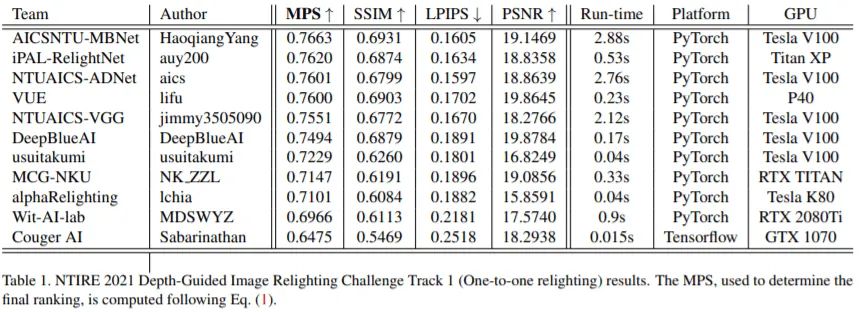
接者又展示了比赛的结果。AICSNTU-MBNet拿下了最高的SSIM和MPS,拿下了这个赛道的冠军。仔细看又发现LPIPS第一名的团队(NTUAICS-ADNet),和冠军队伍是来自相同的单位,真的牛逼。
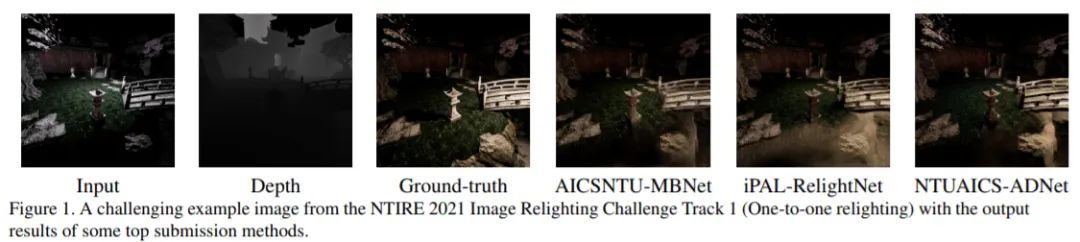
最后展示重照明的结果,展示前三名的结果,看的出来模型的输出和GT差别还是挺大的,可能是因为题目比较新颖,困难,整体的表现还有很大的成长空间。
结语
读完这篇文章后,有两个特点非常值得学习
1, 虽然是影像强化的工作,但作者也参考了RGB-D SOD的思想去设计网络,让我明白要多涉猎不同领域的论文,借鉴别的主题来加强原本的任务。
2,除了网络架构外,数据也是很重要的一环。现在NTIRE的其他赛道像是去雾,超分也都会用额外的数据集,而这篇论文用了track II的资料,让训练集数量翻倍,在比赛中是很聪明的操作。
参考文献
[1] M. El Helou, R. Zhou, S. Susstrunk, R. Timofte ¨ et al., “NTIRE 2021:Depth-guided image relighting challenge,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2021.
[2] H.-H. Yang, W.-T. Chen, H.-L. Luo, and S.-Y. Kuo, “Multimodal bifurcated network for depth guided image relighting,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2021.
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“长尾”获取长尾特征学习资源~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~