
黑客用GitHub服务器挖矿,三天跑了3万个任务,代码惊现中文【文末送书】
共 4735字,需浏览 10分钟
· 2021-04-14


StyleGAN+CLIP=StyleCLIP
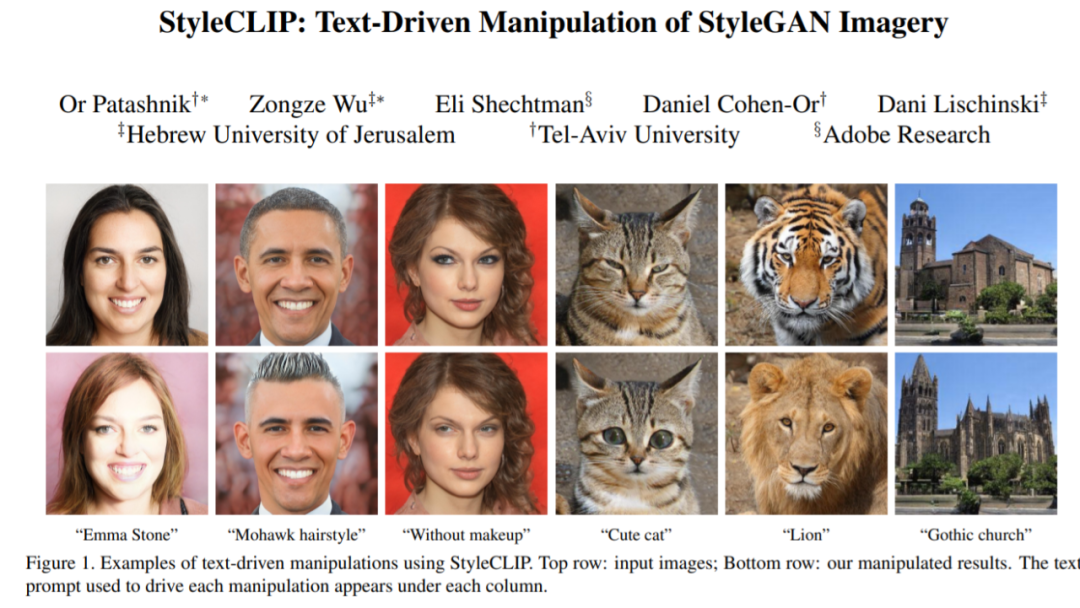
论文链接: https://arxiv.org/pdf/2103.17249.pdf 项目链接: https://github.com/orpatashnik/StyleCLIP
物体6D姿态估计是机器人抓取、虚拟现实等任务中的核心研究问题。近些年来,随着深度学习技术和图像卷积神经网络的快速发展,在提取物体的几何特征方面出现了许多需要改善的问题。国防科技大学的研究人员致力于通过将几何稳定性概念引入物体 6D 姿态估计的方法来解决问题。
近些年来,随着深度传感技术的快速发展,以 PPF 特征匹配算法为代表非学习方法和以 3DMatch 为代表的深度学习几何特征提取方法逐渐在位姿估计问题中崭露头角。这些方法虽然在多个公开数据集中取得了不错的效果,但是没有显式地约束几何特征提取和物体位姿的关系,因此制约了方法的可解释性和泛化性。
将几何稳定性概念引入到物体 6D 姿态估计问题; 提出了基于几何稳定面块组合回归物体位姿的深度网络; 提出了用于处理对称物体、有遮挡的物体以及新颖物体的机制,增强了方法的稳定性。
目前在深度学习领域,一方面需要追求更高的性能,采用强大、复杂的模型网络和实验方法;另一方面又需要关注如何将算法更稳定、高效地在硬件平台上落地。复杂的模型固然展现更好的性能,但过高的存储空间需求和计算资源消耗,是影响在各硬件平台上的落地的重要原因之一。尤其在NLP领域,以BERT、GPT为代表的预训练模型规模越来越大。
针对部署难题,可以使用剪枝、量化、蒸馏等传统的模型压缩技术,但是这些模型压缩技术整体的流程较长,直接串行结合的效果不佳。而OFA(Once For All)[1]技术巧妙地结合了剪枝、蒸馏和结构搜索策略,不仅提升了压缩效果,还简化了压缩流程。
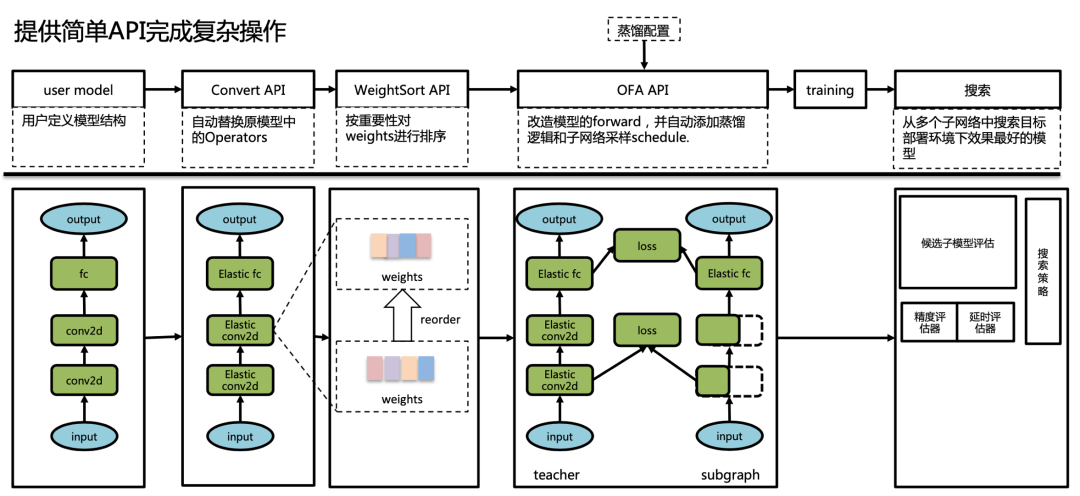
如上图所示,OFA涉及多个复杂的操作,包括按重要性对权重重排、剪枝、蒸馏、子模型搜索等,PaddleSlim将这些操作隐藏到底层,提供给用户简单的适用接口。更重要的是,PaddleSlim提供的接口对用户代码是低侵入的,用户不用修改现有的模型训练代码,通过调用PaddleSlim的转换接口即可将原有模型自动转换为超网络。
项目链接:
https://github.com/PaddlePaddle/PaddleSlim
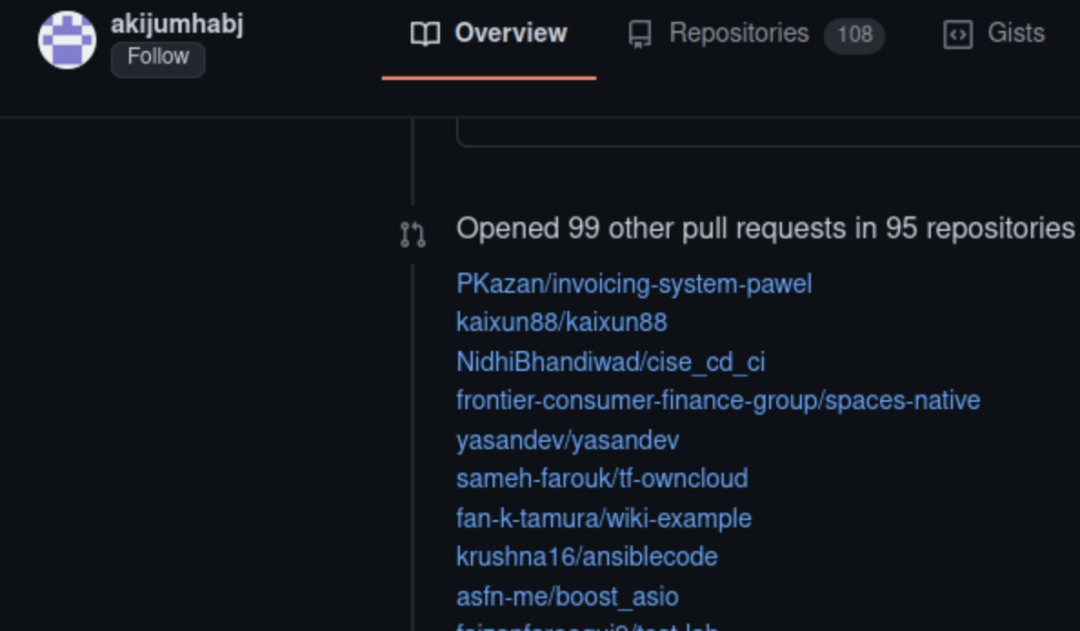
不过蚊子再小也是肉,黑客通过寻找更多接受公开Action的仓库以及反复打开关闭Pull Request就能执行更多的挖矿程序。

👇👇👇👇👇
赠书福利来袭啦
联合北京大学出版社为大家送福利


往 期 推 荐 1、阿里云盘正式公测!免费领1年云盘扩容码,速来,先到先得! 2、牛逼!IntelliJ IDEA居然支持视频聊天了~速来尝鲜!快来冲一波 3、微信这些表情包,我可能再也不敢用了!你还用吗? 4、知名国产网盘翻车?清空免费用户文件后,又开始清理付费用户资源 5、Chrome新功能曝光:你访问的敏感网站可以自动隐藏起来 6、万万没想到,“红孩儿”竟然做了程序员,还是CTO! 7、徒手撸一个Spring Boot中的starter,解密自动化配置,超级棒!

点分享

点收藏

点点赞

点在看