
如何实现一个定时器?看这一篇就够了
“本文主要介绍定时器作用,实现定时器数据结构选取,并详细介绍了跳表,红黑树,时间轮实现定时器的思路和方法。
”
定时器作用
定时器在各种场景都需要用到,比如游戏的Buff实现,Redis中的过期任务,Linux中的定时任务等等。顾名思义,定时器的主要用途是执行定时任务。
定时器数据结构选取
定时器数据结构要求:
需要快速找到到期任务,因此,应该具有有序性; 其过期执行、插入(添加定时任务)和删除(取消定时任务)的频率比较高,三种操作效率必须保证
以下为各数据结构时间复杂度表现
有序链表:插入O(n),删除O(1),过期expire执行O(1)
最小堆:插入O(logn),删除O(logn),过期expire执行O(1)
红黑树:插入O(logn),删除O(logn),过期expire执行O(logn)
哈希表+链表(时间轮):插入O(1),删除O(1),过期expire平均执行O(1)(最坏为O(n))
不同开源框架定时器实现方式不一,如,libuv采用最小堆来实现,nginx采用红黑树实现,linux内核和skynet采用时间轮算法实现等等。
定时器接口封装
作为定时器,需要封装以下4类接口给用户使用:
创建定时器: init_timer添加定时任务: add_timer取消定时任务: cancel_timer执行到期任务: expire_timer
其中执行到期任务有两种工作方式:
轮询: 每隔一个时间片去查找哪些任务到期 睡眠/唤醒:不停查找deadline最近任务,到期执行,否则sleep;sleep期间,任务有改变,线程会被唤醒
接下来将介绍分别用跳表、红黑树、时间轮来实现定时器。
跳表实现定时器
跳表简介
跳表是一种动态的数据结构,采用空间换时间的思想,在有序链表基础上加入多级索引,通过索引进行二分快速查找,支持快速删除、插入和查找操作(平均时间复杂度为O(logN),最坏为O(N)),效率可与平衡树媲美,实现比其简单。
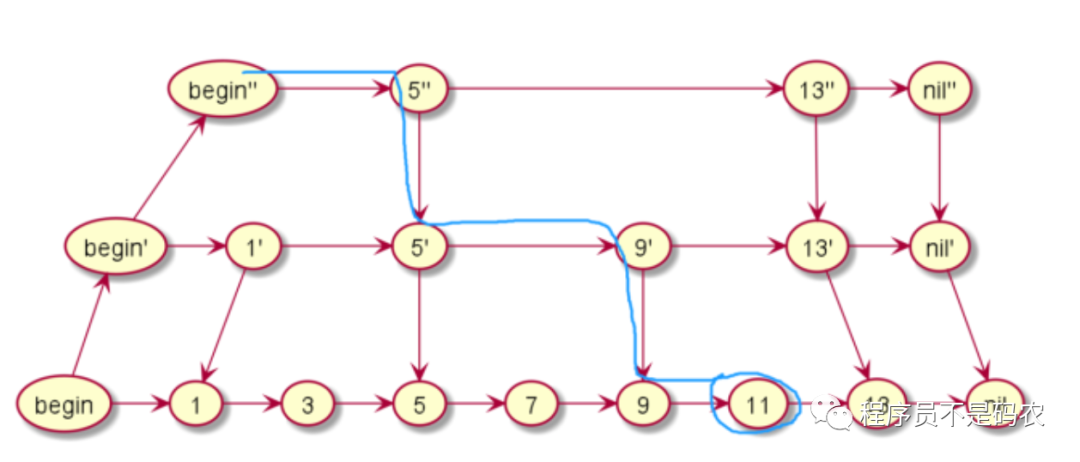
下面通过一张图来简单说明跳表操作。跳表的最底层即为基本的有序链表,存储所有的数据,可理解为数据层;往上则为索引层,理想状态下,上一层为下一层节点数的一半。比如,要查找下图的数据为11的节点,从begin''出发,向右走,如果下一个节点大于11则往下走,直到找到目标节点。可见,跳表要比原始链表少比较一些节点,但前提是需要花更多空间存储索引节点。
跳表实现定时器
跳表查找,插入,删除(任意节点、头节点)的时间复杂度大概率趋向于
O(logn)过期任务查找,只需要跟第一个节点比较,因其第一个节点即为最小节点
学会吸取开源框架中优秀数据结构和代码思想,直接采用redis中跳表结构的实现,取出所需部分,用于实现定时器。如下:
跳表数据结构
跳表节点与跳表结构
/*skiplist.h*/
#define ZSKIPLIST_MAXLEVEL 32
#define ZSKIPPLIST 0.25
typedef struct zskiplistNode zskiplistNode;
typedef void (*handler_pt) (zskiplistNode * node);
// 跳表节点
struct zskiplistNode {
unsigned long score; /*用于排序的值*/
handler_pt handler; /*处理函数*/
struct zskiplistLevel {
struct zskiplistNode **forward;
}level[];
};
// 跳表结构
typedef struct zskiplist {
struct zskiplistNode * header;
int length;
int level; /*跳表层数*/
}zskiplist;
跳表接口申明
具体接口实现细节请移步redis源码。
/*skiplist.h*/
/*创建跳表,初始化*/
zskiplist *zslCreate(void);
/*删除跳,表释放资源*/
void zslFree(zskiplist *zsl);
/*插入节点*/
zskiplistNode *zslInsert(zskiplist *zsl, unsigned long score, handler_pt func);
/*删除头节点*/
void zsklDeleteHead(zskiplist *zsl);
/*删除任意节点*/
void zslDelete(zskiplist *zsl, zskplistNode *zn);
/*打印,调试*/
void zslPrint(zskiplist *zsl);
定时器接口实现
主要介绍四个接口实现:初始化定时器,添加定时任务,删除/取消定时任务,处理定时任务
// test_user.c 封装给用户使用的接口
static uint32_t
current_time() {
uint32_t t;
struct timespec ti;
clock_getttime(CLOCK_MONOTONIC, &ti);
t = (uint32_t)ti.tv_sec * 1000;
t += ti.tv_sec / 1000000;
}
zskiplist *init_timer() {
// 初始化定时器
return zslCreate();
}
zskiplistNode *add_timer(zskiplist *zsl, uint32_t msec, handler_pt func) {
// 添加定时任务
msec += current_time();
return zslInsert(zsl, msec, func);
}
void cancel_timer(zskiplist *zsl, zskiplistNode *zn) {
// 删除/取消定时任务
zslDelete(zsl, zn);
}
void expire_timer(zskiplist *zsl){
// 处理定时任务
zskiplistNode *x;
uint32_t now = current_time();
for (;;) {
x = zslMin(zsl); // 最近节点
if (!x) break;
if (x->score > now) break; // 时间未到
x->handler(x); // 执行相关定时任务
zslDeleteHead(zsl); // 执行完删除
}
}
红黑树实现定时器
红黑树
红黑树是一种自平衡的二叉查找树,即,插入和删除操作如果破坏树的平衡时,需要重新调整达到平衡状态。因此,是一种比较难的数据结构。
红黑树五条性质
每个节点要么是红色,要么是黑色 根节点是黑色 每个叶子结点是黑色 每个红节点的两个子节点一定是黑色 任意一节点到每个叶子节点的路径都含相同数目的黑结点
弄懂红黑树如何调整树的平衡,保证满足这5条性质,是比较麻烦,需要耐心的去推导一遍,此处不展开。
红黑树实现定时器
AVL 树平衡要求太高,维护平衡操作过多,较复杂;红黑树只需维护一个黑高度,效率较高
红黑树查找,删除,添加时间复杂度为:O(log(n))
吸取开源框架中优秀数据结构和代码思想,选用nginx中的红黑树结构
红黑树数据结构
红黑树节点与红黑树
// rbtree.h 红黑树数据结构以及相关接口,具体接口实现同上
#ifndef _NGX_RBTREE_H_INCLUDE_
#define _NGX_RBTREE_H_INCLUDE_
typedef unsigned int ngx_rbtree_key_t;
typedef unsigned int ngx_uint_t;
typedef int ngx_rbtree_key_int_t;
// 红黑树节点
typedef struct ngx_rbtree_node_s ngx_rbtree_node_t;
struct ngx_rbtree_node_s {
ngx_rbtree_key_t key;
ngx_rbtree_node_t *left;
ngx_rbtree_node_t *right;
ngx_rbtree_node_t *parent;
u_char color; // 节点颜色
u_char data; // 节点数据
};
// 插入函数指针
typedef void (*ngx_rbtree_insert_pt) (ngx_rbtree_node_t *root,
ngx_rbtree_node_t *node, ngx_rbtree_node_t *sentinel);
// 红黑树
typedef struct ngx_rbtree_s ngx_rbtree_t;
struct ngx_rbtree_s {
ngx_rbtree_node_t *root;
ngx_rbtree_node_t *sentinel;
ngx_rbtree_insert_pt insert;
};
红黑树接口声明
// 红黑树初始化
#define ngx_rbtree_init(tree, s, i) \
ngx_rbtree_sentinel_init(s); \
(tree)->root = s; \
(tree)->sentinel = s; \
(tree)->insert = i;
// 插入操作
void ngx_rbtree_insert(ngx_rbtree_t *tree, ngx_rbtree_node_t *node);
// 删除操作
void ngx_rbtree_delete(ngx_rbtree_t *tree, ngx_rbtree_node_t *node);
// 插入value
void ngx_rbtree_insert_value(ngx_rbtree_node_t *root, ngx_rbtree_node_t *node,
ngx_rbtree_node_t *sentinel);
// 插入timer
void ngx_rbtree_insert_timer_value(ngx_rbtree_node_t *root,
ngx_rbtree_node_t *node,
ngx_rbtree_node_t *sentinel);
// 获取下一个节点
ngx_rbtree_node_t *ngx_rbtree_next(ngx_rbtree_t *tree, ngx_rbtree_node_t *node);
#define ngx_rbt_red(node) ((node)->color = 1)
#define ngx_rbt_black(node) ((node)->color = 0)
#define ngx_rbt_is_red(node) ((node)->color)
#define ngx_rbt_is_black(node) (!ngx_rbt_is_red(node))
#define ngx_rbt_copy_color(n1, n2) (n1->color = n2->color)
#define ngx_rbtree_sentinel_init(node) ngx_rbt_black(node)
// 找到最小值,一直往左走即可
static inline ngx_rbtree_node_t *
ngx_rbtree_min(ngx_rbtree_node_t *node, ngx_rbtree_node_t *sentinel)
{
while (node->left != sentinel){
node = node->left;
}
return node;
}
定时器接口实现
// test_user.c 封装给用户使用的接口
ngx_rbtree_t timer;
static ngx_rbtree_node_t sentinel;
typedef struct timer_entry_s timer_entry_t;
typedef void (*timer_handler_pt)(timer_entry_t *ev);
struct timer_entry_s {
ngx_rbtree_node_t timer;
timer_handler_pt handler;
};
// 初始化
int init_timer() {
ngx_rbtree_init(&timer, &sentinel, ngx_rbtree_insert_timer_value);
return 0;
}
// 添加定时任务
void add_timer(timer_entry_t *te, uint32_t msec) {
msec += current_time();
te->timer.key = msec;
ngx_rbtree_insert(&timer, &te->timer);
}
// 取消定时
void cancel_timer(timer_entry_t *te) {
ngx_rbtree_delete(&timer, &te->timer);
}
// 执行到期任务
void expire_timer() {
timer_entry_t *te;
ngx_rbtree_node_t *sentinel, *root, *node;
sentinel = timer.sentinel;
uint32_t now = current_time();
for(;;){
root = timer.root;
if (root == sentinel) break;
if (node->key > now) break;
te = (timer_entry_t *) ((char *) node - offsetof(timer_entry_t, timer));
te->handler(te);
ngx_rbtree_delete(&timer, &te->timer);
free(te);
}
}
以上,为红黑树和跳表实现的定时器,多线程环境下加锁粒度比较大,高并发场景下效率不高,而时间轮适合高并发场景,如下。
时间轮实现定时器
时间轮
可以用于高效的执行大量定时任务,如下为分层时间轮示意图:
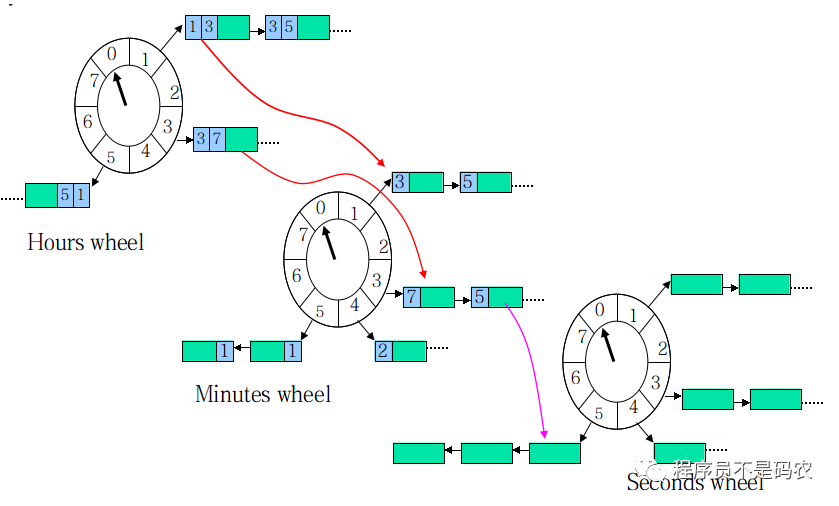
时间轮可参考时钟进行理解,秒针(Seconds wheel)转一圈,则分针(Minutes wheel)走一格,分针(Minutes wheel)转一圈,则时针(Hours wheel)走一格。随着,时间的流逝,任务不断从上层流下下一层,最终到达秒针轮上,当秒针走到时执行。
如上所示,时间轮大小为8格,秒针1s转动一格,其每一格所指向的链表保存着待执行任务。比如,如果当前指针指向1,要添加一个3s后执行的任务,由于1+3=4,即在第4格的链表中添加一个任务节点即可。如果要添加一个10s后执行的任务,10+1=11,超过了秒针轮范围,因此需要对8取模11 % 8 = 3,即,会把这个任务放到分针轮上3对应的链表上,之后再从分针轮把任务丢到秒针轮上进行处理。也即,**秒针轮(Seconds wheel)**即保存着最近将要执行的任务,随着时间的流逝,任务会慢慢的从上层流到秒针轮中进行执行。
优点:加锁粒度较小,只需要加一个格子即可,一个格子对应一串链表;适合高并发场景
缺点:不好删除
如何解决时间轮定时任务删除?
通过引用计数来解决 交由业务层处理,将删除标记设为 true, 在函数回调中根据这个标记判断是否需要处理
这里介绍两种定时器实现方案,一种是简单实现方案,另一种是skynet较为复杂的实现。
时间轮实现定时器
简单时间轮实现方案
功能场景:由心跳包进行超时连接检测,10s未收到则断开连接
一般做法:map<fd, *connect>每秒轮询这个结构,检测所有连接是否超时,收到心跳包,记录时间戳
缺点:效率很差,每次需要检测所有连接,时间复杂度为O(n)
优化:分治大法,只需检测快过期的连接, 采用hash数组+链表形式,数组大小设置成16 :[0] + [1] + [2] + ... + [15] ,相同过期时间的放入一个数组,因此,每次只需检测最近过期的数组即可,不需要遍历所有。
数据结构定义
以下为定时器节点,增加引用计数ref, 只有当ref为0时删除连接。
class CTimerNode {
public:
CTimerNode(int fd) : id(fd), ref(0) {}
void Offline() {this->ref = 0};
bool tryKill() {
if (this->ref == 0) return true;
DecRef();
if (this->ref == 0){
return true;
}
return false;
}
void IncRef() {this->ref++;}
protected:
void DecRef() {this->ref--;}
private:
int ref;
int id;
}
// 时间轮数组大小16, (x对16取余)==(x&1111) 落到0-15之间,即落到对应的数组
const int TW_SIZE = 16;
const in EXPIRE = 10; // 过期间隔
const int TW_MASK = TW_SIZE - 1; // 掩码, 用于对16取余
static size_t iReadTick = 0; // 滴答时钟
typedef list<CTimerNode*> TimeList; // 数组每一个槽位对应一个list
typedef TimeList::iterator TimeListIter;
typedef vector<TimeList> TimeWheel; // 时间轮
定时器接口
// 添加定时
void AddTimeOut(TimerWheel &tw, CTimerNode *p) {
if (p) {
p->IncRef();
// 找到iRealTick对应数组的idx(槽位)
TimeList &le = tw[(iRealTick+EXPIRE) & TW_MASK];
le.push_back(p); // 把时间节点加入list中
}
}
// 延时调用
void AddTimeOutDelay(TimeWheel &tw, CTimerNode *p, size_t delay) {
if (p) {
p->IncRef();
TimeList &le = tw[(iRealTick + EXPIRE + delay) & TW_MASK];
le.push_back(p);
}
}
// 时间轮移动
void TimerShift(TimeWheel &tw) {
size_t tick = iRealTick;
iRealTick++;
TimeList &le = tw[tick & TW_MASK];
TimeListIter iter = le.begin();
for (; iter != le.end(); iter++) {
CTimerNode *p = *iter;
if (p && p->trySkill()){
delete p;
}
}
le.clear();
}
Skynet定时器实现方案
skynet中定时器数据结构
采用时间轮方式,hash表+链表实现,
struct timer_node { //时间节点
struct timer_node *next;
uint32_t expire; //到期滴答数
};
struct link_list { // 链表
struct timer_node head;
struct timer_node *tail;
};
struct timer {
struct link_list near[256]; // 即将到来的定时器
struct link_list t[4][64]; // 相对较遥远的定时器
struct spinlock lock;
uint32_t time; // 记录当前滴答数
uint64_t starttime;
uint64_t current;
uint64_t current_point;
};
其中time为32位无符号整数, 记录时间片对应数组near[256] ,表示即将到来的定时任务, t[4][64],表示较为遥远的定时任务。
定时器执行流程
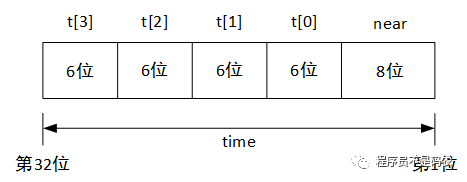
| t[3] | t[2] | t[1] | t[0] | near |
|---|---|---|---|---|
| 26-32位 | 20-26位 | 14-20位 | 8-14位 | 0-8位 |
[2^(8+6x3),2^(8+6x4)-1] | [2^(8+6x2),2^(8+6x3)-1] | [2^(8+6),2^(8+6x2)-1] | [2^8,2^(8+6) -1] | [0,2^8-1] |
首先检查节点的 expire与time的高24位是否相等,相等则将该节点添加到expire低8位值对应数组near的元素的链表中,不相等则进行下一步检查 expire与time的高18位是否相等,相等则将该节点添加到expire低第9位到第14位对应的6位二进制值对应数组t[0]的元素的链表中,否则进行下一步检查 expire与time的高12位是否相等,相等则将该节点添加到expire低第15位到第20位对应的6位二进制值对应数组t[1]的元素的链表中,如果不相等则进行下一步检查 expire与time的高6位是否相等,相等则将该节点添加到expire低第21位到第26位对应的6位二进制值对应数组t[2]的元素的链表中,如果不相等则进行下一步将该节点添加到 expire低第27位到第32位对应的6位二进制值对应数组t[3]的元素的链表中
以下为具体实现,仅贴出主要接口,具体细节请参考skynet源代码。
定时器初始化
// skynet_start.c
// skynet 启动入口
void
skynet_start(struct skynet_config * config) {
...
skynet_timer_init();
...
}
// skynet_timer.c
void
skynet_timer_init(void) {
// 创建全局timer结构 TI
TI = timer_create_timer();
uint32_t current = 0;
systime(&TI->starttime, ¤t);
TI->current = current;
TI->current_point = gettime();
}
添加定时器
通过skynet_server.c中的cmd_timeout调用skynet_timeout添加新的定时器
// TI为全局的定时器指针
static struct timer * TI = NULL;
int skynet_timeout(uint32_t handle, int time, int session) {
...
struct timer_event event;
event.handle = handle; // callback
eveng.session = session;
// 添加新的定时器节点
timer_add(TI, &event, sizeof(event), time);
return session;
}
// 添加新的定时器节点
static void timer_add(struct timer *T, void 8arg, size_t sz, int time) {
// 给timer_node指针分配空间,还需要分配timer_node + timer_event大小的空间,
// 之后通过node + 1可获得timer_event数据
struct timer_node *node = (struct timer_node *)skynet_malloc(sizeof(*node)+sz);
memcpy(node+1,arg,sz);
SPIN_LOCK(T);
node->expire=time+T->time;
add_node(T, node);
SPIN_UNLOCK(T);
}
// 添加到定时器链表里,如果定时器的到期滴答数跟当前比较近(<2^8),表示即将触发定时器添加到T->near数组里
// 否则根据差值大小添加到对应的T->T[i]中
static void add_node(struct timer *T, struct timer_node *node) {
...
}
驱动方式
skynet启动时,会创建一个线程专门跑定时器,每帧(0.0025s)调用skynet_updatetime()
// skynet_start.c
static void *
thread_timer(void *p) {
struct monitor * m = p;
skynet_initthread(THREAD_TIMER);
for (;;) {
skynet_updatetime(); // 调用timer_update
skynet_socket_updatetime();
CHECK_ABORT
wakeup(m,m->count-1);
usleep(2500); // 2500微秒 = 0.0025s
if (SIG) {
signal_hup();
SIG = 0;
}
}
...
}
每个定时器设置一个到期滴答数,与当前系统的滴答数(启动时为0,1滴答1滴答往后跳,1滴答==0.01s ) 比较得到差值interval;
如果interval比较小(0 <= interval <= 2^8-1),表示定时器即将到来,保存在第一部分前2^8个定时器链表中;否则找到属于第二部分对用的层级中。
// skynet_timer.c
void
skynet_updatetime(void) {
...
uint32_t diff = (uint32_t)(cp - TI->current_point);
TI->current_point = cp;
TI->current += diff;
// diff单位为0.01s
for (i = 0; i < diff; i++){
timer_update(TI);
}
}
static void
timer_update(struct timer *T) {
SPIN_LOCK(T);
timer_execute(T); // 检查T->near是否位空,有就处理到期定时器
timer_shift(T); // 时间片time++,移动高24位的链表
timer_execute(T);
SPIN_UNLOCK(T);
}
// 每帧从T->near中触发到期得定时器
static inline void
timer_execute(struct timer *T) {
...
}
// 遍历处理定时器链表中所有的定时器
static inline void
dispatch_list(struct timer_node *current) {
...
}
// 将高24位对应的4个6位的数组中的各个元素的链表往低位移
static void
timer_shift(struct timer *T) {
...
}
// 将level层的idx位置的定时器链表从当前位置删除,并重新add_node
static void move_list(struct timer *T, int level, int idx) {
}
最小堆实现定时器
最小堆实现例子:boost.asio采用二叉树,go采用四叉树, libuv
具体实现略。
总结
本文主要介绍定时器作用,实现定时器数据结构选取,并详细介绍了跳表,红黑树,时间轮实现定时器的思路和方法。
参考
跳表介绍
https://baijiahao.baidu.com/s?id=1633338040568845450&wfr=spider&for=pc
Skynet GitHub
https://github.com/cloudwu/skynet
skynet源码剖析
https://zhongyiqun.gitbooks.io/skynet/content/18-skynetding-shi-qi-yuan-li.html