 极市平台
极市平台




极市直播丨方浩:车道线检测新SOTA,RESA:循环特征位移聚合器(AAAI2021)
➤论文地址
RESA: Recurrent Feature-Shift Aggregator for Lane Detection
论文地址:
https://arxiv.org/abs/2008.13719
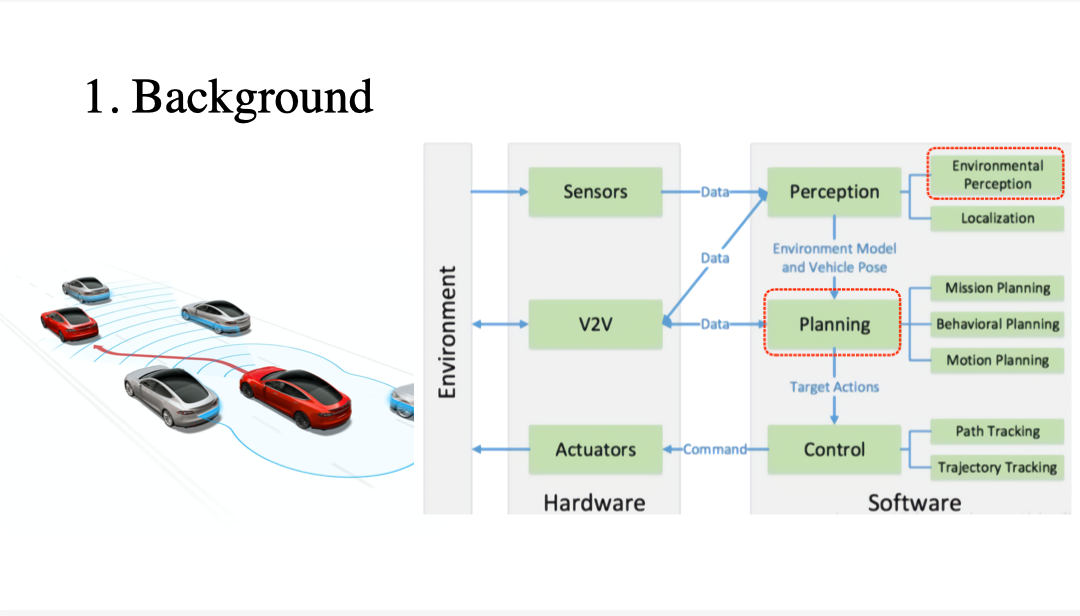
1. 车道线检测的问题背景与应用场景
2. 车道线检测的解决方案
3. 问题分析与论文介绍
➤回放视频在这里☟(建议在pc端观看)
➤部分PPT截图

往期线上分享集锦:http://bbs.cvmart.net/topics/149/cvshare(或直接阅读原文)
推荐阅读