技术圈首页
程序员
解决方案
聚合短信
APP下载
登录
注册
首页
文章详情
手残党福音:不会摘隐形眼镜?这个机器人可以帮你
恋习Python
|
294
2020-11-17 21:31
0
0
0
大数据文摘出品
作者:苏苏、牛婉杨
继剪发机器人之后,又一款让文摘菌“闻风丧胆”的黑科技问世——戴隐形眼镜机器人。
不同的是,这款机器人的诞生,是因为开发者 Craig Hershoff 确实在这方面有迫切的需求。
Hershoff 在2000年被诊断出患有营养不良症,险些遭遇失明。在此后的十年里,他来来回回进行了3次角膜移植手术。与视力斗争多年后,Hershoff发现了一种名叫 巩膜接触镜 的特殊隐形眼镜,这对他的视力有很大的帮助。
然而,后来他发现自己在戴和取隐形眼镜时,手开始颤抖了。
“几年后,如果我真的因为手抖而不能戴隐形眼镜该怎么办?”
于是,一款名叫 Cliara 的帮助戴/取隐形眼镜的机器人诞生了。
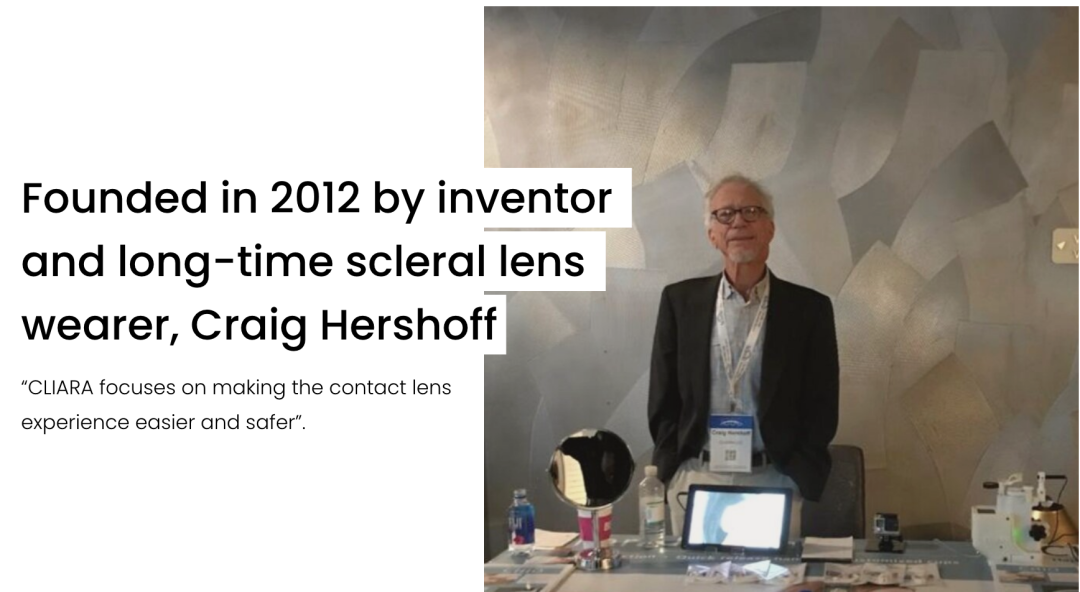
Craig Hershoff,光学设计公司CLIARA LLC创始人
无需上手,语音就能控制机器人戴眼睛
先来看看它是如何帮助戴隐形眼镜的。
首先,人需要弯下腰面部朝下,如果你要给右眼戴隐形眼镜,那么左眼可以实时看到另一只眼睛佩戴隐形眼镜的画面。
Cliara的运作原理是,先把隐形眼镜放在前端软管吸嘴上,
使用者可以声控作出指令,完全无需用手操作
,然后软管会以缓慢的速度接近眼球,将隐形眼镜放至眼球表面。
不用担心它会用力过度,因为这个机器有着一个
非常敏感的力传感器
可以检测到是否接触,并在戴上眼镜的那一刻停止运动,随后装置会收回至最初状态。
若要摘下隐形眼镜,设备则会以吸力带走。
这款微型机械人装置现时在波士顿接受临床试验,Craig Hershoff 希望能在明年初获美国食品及药物管理局(FDA)认证,然后正式推出市面,以帮助那些自己不方便戴隐形眼镜的人,比如那些行动不便或身患残疾的人,他们缺乏足够的能力来保持手的稳定或灵巧性去安全地佩戴和摘掉细小的镜片。
致力于使隐形眼镜的使用更加容易和安全
CLIARA LLC是一家光学设计公司,成立于2012年,创始人Craig Hershoff 创立这家公司是希望使隐形眼镜的使用更加容易和安全。
网站链接:
https://www.cliaraeyes.com/
这家公司现有的一款产品是一个帮助佩戴隐形眼镜的手持设备Cliara Chio,售价19.95美元。这款设备上有一个戴/取两用的吸盘,该公司正在为此申请专利。
该公司称,这款产品能够为那些自己很难戴上隐形眼镜的用户节省很多的时间,戴/取隐形眼镜都方便快捷,一次成功。最重要的是卫生安全。
而Cliara机器人则是该公司的第二款产品,Craig Hershoff 希望能在明年初获美国食品及药物管理局(FDA)认证,然后正式推广上市。
不过,在相关报道的评论底下,目前还是一边倒的“不敢试”,毕竟稍有不慎,被摘掉的可能就不只是隐形眼镜了。
你怎么看?
相关报道:
https://gizmodo.com/contact-lens-removing-robot-requires-more-faith-in-tech-1845585979
https://edition.cnn.com/2020/11/08/us/florida-man-contact-lens-robot-trnd/index.html
恋
习Python
关注恋习Python,Python都好练
好文章,我
在看
❤️
0
赞
0
收藏
×
添加附言
附加内容, 使用此功能的话, 会给所有参加过讨论的人发送提醒.
回复数量:
0
暂无评论~~
请注意单词拼写,以及中英文排版,
参考此页
支持 Markdown 格式,
**粗体**
、~~删除线~~、
`单行代码`
, 更多语法请见这里
Markdown 语法
支持表情,见
Emoji cheat sheet
@name 会链接到用户页面,并会通知他
上传图片, 支持拖拽和剪切板黏贴上传, 格式限制 - jp(e)g, png, gif
Ctrl+Enter
下载APP
恋习Python
1509
文章
30
获赞
关注TA
NEW
相关文章推荐
手残党福音:不会摘隐形眼镜?这个机器人可以帮你
【推荐系统】多目标学习在推荐系统中的应用
YOLOv4团队开源最新力作!1774fps、COCO最高精度,分别适合高低端GPU的YOLO
2020 Crowdhuman人体检测比赛第一名经验总结
H5 移动端调试全攻略
YOLOv4团队开源最新力作!1774fps、COCO最高精度,分别适合高低端GPU的YOLO
在 Azure App Service 上启用 Application Request Routing
YOLOv4官方改进版来了!55.8% AP!速度最高达1774 FPS,Scaled-YOLOv4正式开源!
 恋习Python
恋习Python





 Craig Hershoff,光学设计公司CLIARA LLC创始人
Craig Hershoff,光学设计公司CLIARA LLC创始人


 Craig Hershoff,光学设计公司CLIARA LLC创始人
Craig Hershoff,光学设计公司CLIARA LLC创始人
 NEW
NEW

