
ROS 八叉树地图构建 - 安装 octomap 和 octomap_server 建图包!
共 2361字,需浏览 5分钟
· 2020-08-13

登龙
这是我的第 145 篇原创
项目要用到八叉树库 Octomap 来构建地图,这里记录下安装、可视化,并启用带颜色的 Octomap 的过程。
一、Apt 安装 Octomap 库
如果你不需要修改源码,可以直接安装编译好的 octomap 库,记得把 ROS 版本「kinetic」替换成你用的:
sudo apt-get install ros-kinetic-octomap*
上面这一行命令等价于安装以下的 octomap 组件:
sudo apt-get install ros-kinetic-octomap ros-kinetic-octomap-mapping ros-kinetic-octomap-msgs ros-kinetic-octomap-ros ros-kinetic-octomap-rviz-plugins
注意:上面没有安装 ros-kinetic-octomap-server,原因是我要使用这个包来建图,并且需要修改它,所以在下一步我直接通过编译源码来安装它!
二、编译安装 OctomapServer 建图包
因为我要启用八叉树体素栅格的 RGB 颜色支持,需要修改源码,所以必须使用源码编译安装,过程如下:
2.1 创建编译用的工作空间
cd 你的一个目录/
# 创建工作空间
mkdir octomap_ws
cd octomap_ws/
# ROS 的工作空间必须包含 src 目录
mkdir src/
# 创建
catkin_make
# 记得 source 环境变量
source devel/setup.zsh
2.2 下载编译源码
下载 octomap_server 源码到 src 文件夹中:
cd src/
git clone https://github.com/OctoMap/octomap_mapping.git
返回你的工作空间主目录,安装下依赖,然后开始编译:
cd ../
rosdep install octomap_mapping
catkin_make
编译过程基本没有报错,如果你遇到问题,直接复制错误信息浏览器搜索解决,然后启动测试的 launch:
roslaunch octomap_server octomap_mapping.launch
没问题的话应该可以用 rostopic list 看到一个 octomap_full 的话题:
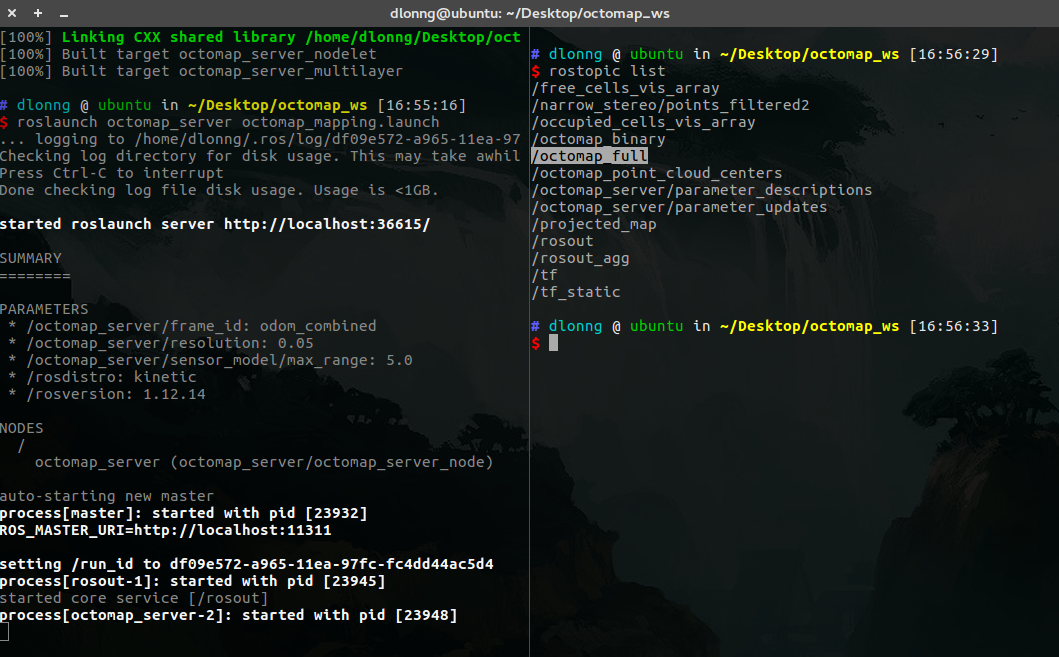
有这个话题说明这个建图包可以正常工作啦:)
二、Rviz 可视化 Octomap
ROS 中提供了一个 Rviz 可视化 Octomap 的插件,如果没有安装使用下面的命令即可:
sudo apt-get install ros-kinetic-octomap-rviz-plugins
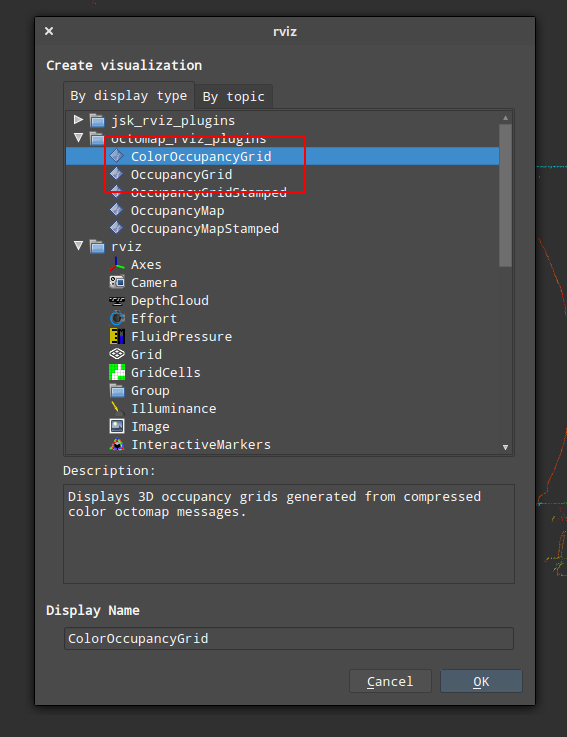
安装后启动 Rviz,直接添加一个八叉树占用网格的类型,第一个是带颜色的类型,第二个不带颜色:
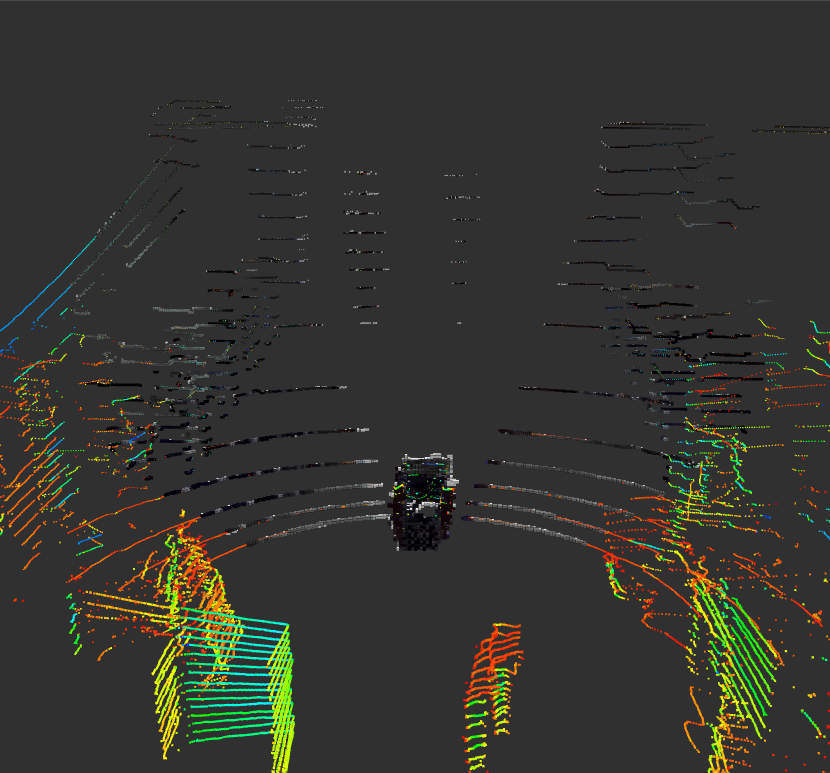
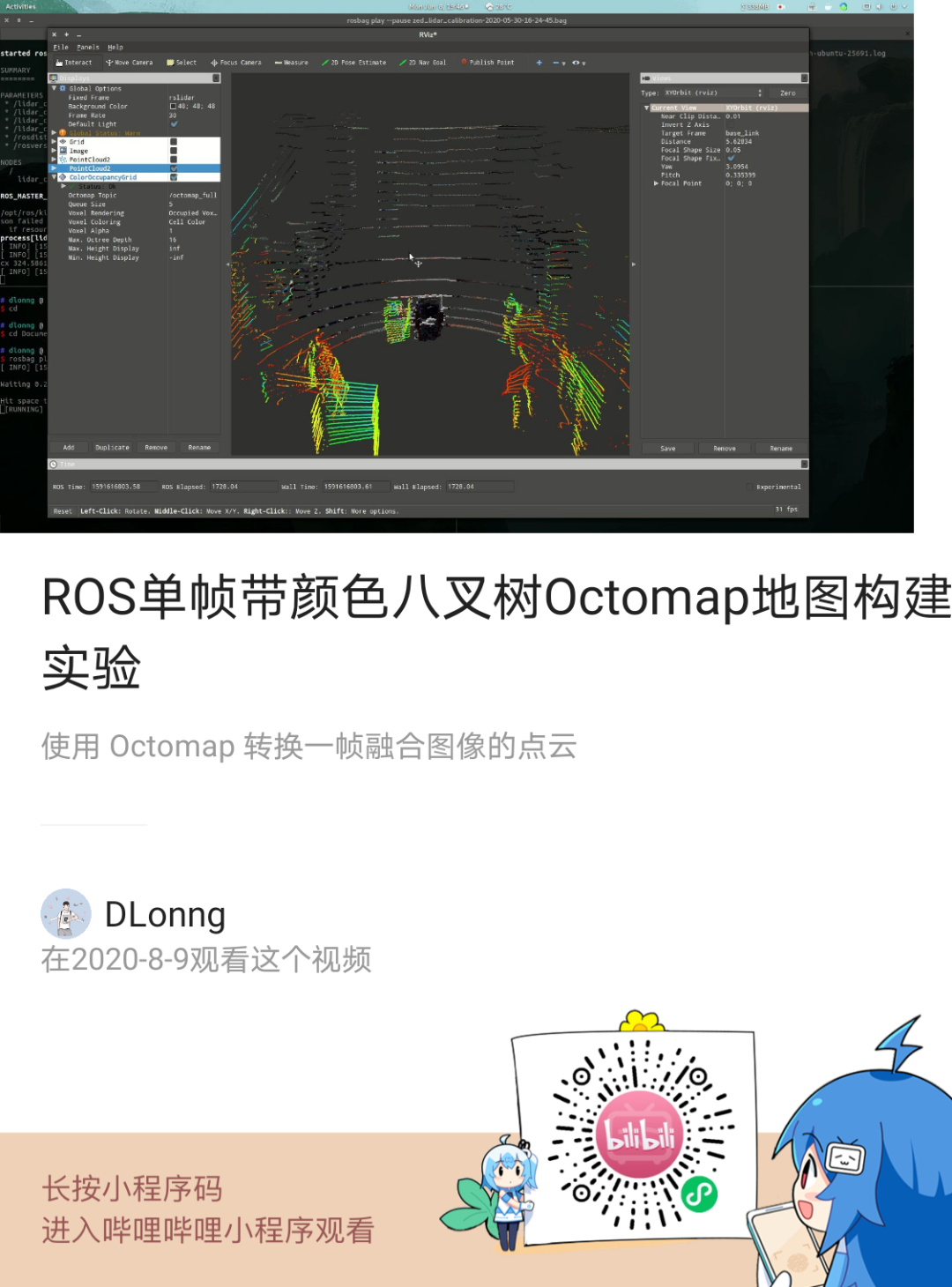
建图节点启动后,选择话题名称为 octomap_full,即可显示出八叉树体素栅格,这是我的实验结果,我用的是第一个带颜色的类型:
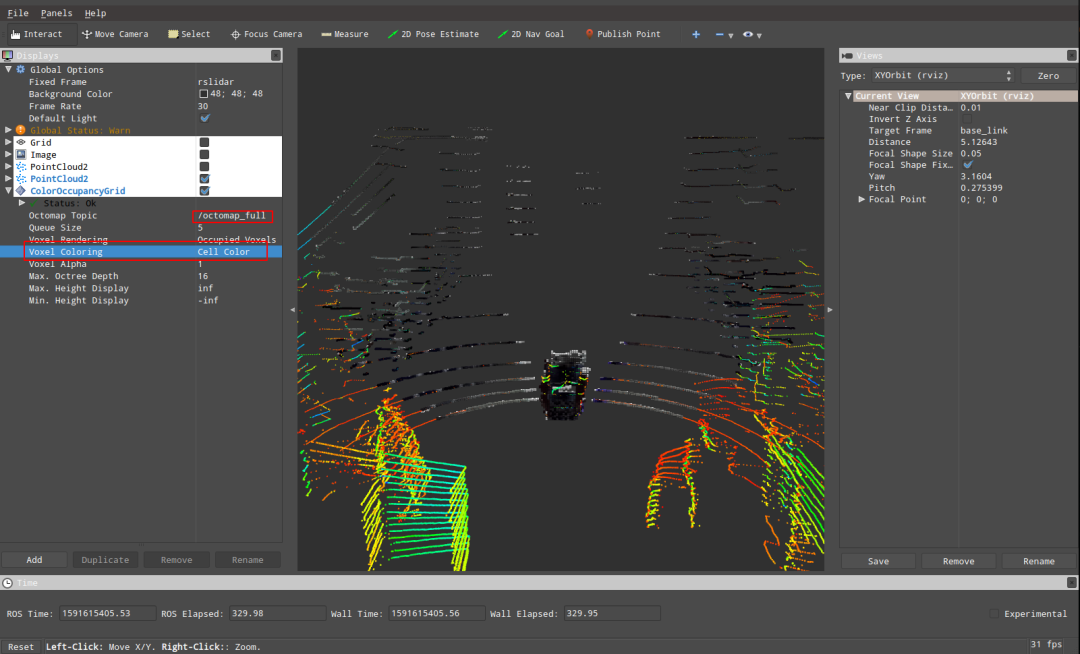
我把点云和体素栅格一起显示了,所以会重叠。这里要注意的是,如果你的点云显示不出来,要检查下「Global Options」的「Fixed Frame」有没有设置正确,我是设置的是 Robosense 雷达的 frame_id:「rslidar」。
三、启用 ColorOctomap
默认编译的 octomap 不能显示颜色,要开启颜色的支持,需要 2 个步骤,第一步编辑 OctomapServer.h 文件:
vim octomap_mapping/octomap_server/include/octomap_server/OctomapServer.h
打开下面 COLOR_OCTOMAP_SERVER 宏的注释即可:
// switch color here - easier maintenance, only maintain OctomapServer.
// Two targets are defined in the cmake, octomap_server_color and octomap_server. One has this defined, and the other doesn't
// 打开这个注释
#define COLOR_OCTOMAP_SERVER
然后重新编译一遍源码:
cd octomap_ws/
catkin_make
第二步是在使用时,在 launch 文件中禁用 height_map,启用 colored_map,这个配置是我阅读源码查找的,因为官网文档很久没有更新了,一些参数配置方法需要通过阅读源码才能知道:
<param name = "height_map" value = "false" />
<param name = "colored_map" value = "true" />
比如以下是我实验用的 launch 文件:
<launch>
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.10" />
<param name="frame_id" type="string" value="world" />
<param name = "height_map" value = "false" />
<param name = "colored_map" value = "true" />
<remap from="/cloud_in" to="/fusion_cloud" />
node>
launch>
我设置了八叉树帧的 frame 为 rslidar,并将融合的点云话题 /fusion_cloud 作为节点的输入,我没有提供 TF,因为目前只是做了一个单帧的体素栅格构建,效果如下:
我在 B 站录了个简短的视频,可以去看下初步的效果:
推荐阅读:
厦大同学,与你分享编程,AI 算法等技术干货!精品文章创作不易,谢谢关注,欢迎在看。

点击阅读原文,查看更多精彩文章!